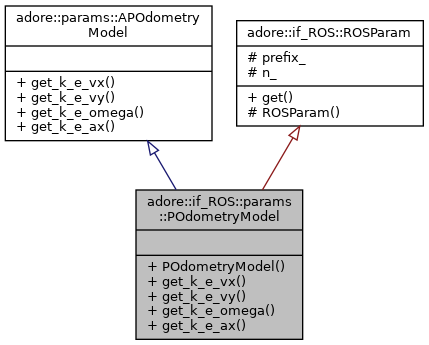
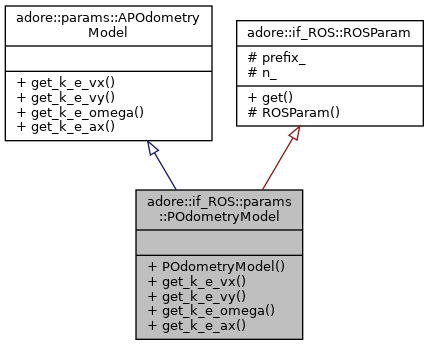
#include <p_odometrymodel.h>
|
| template<typename T > |
| void | get (const std::string &name, T &result) const |
| |
| | ROSParam (ros::NodeHandle n, std::string prefix) |
| |
| std::string | prefix_ |
| |
| ros::NodeHandle | n_ |
| |
◆ POdometryModel()
| adore::if_ROS::params::POdometryModel::POdometryModel |
( |
ros::NodeHandle |
n, |
|
|
std::string |
prefix |
|
) |
| |
|
inline |
◆ get_k_e_ax()
| virtual double adore::if_ROS::params::POdometryModel::get_k_e_ax |
( |
| ) |
const |
|
inlineoverridevirtual |
◆ get_k_e_omega()
| virtual double adore::if_ROS::params::POdometryModel::get_k_e_omega |
( |
| ) |
const |
|
inlineoverridevirtual |
◆ get_k_e_vx()
| virtual double adore::if_ROS::params::POdometryModel::get_k_e_vx |
( |
| ) |
const |
|
inlineoverridevirtual |
◆ get_k_e_vy()
| virtual double adore::if_ROS::params::POdometryModel::get_k_e_vy |
( |
| ) |
const |
|
inlineoverridevirtual |
The documentation for this class was generated from the following file:
- /home/akoerner/repos/csa/github.com/akoerner1/adore_docs_publish/adore/adore_if_ros/adore_if_ros/include/adore_if_ros/params_factory/p_odometrymodel.h


 Private Member Functions inherited from adore::if_ROS::ROSParam
Private Member Functions inherited from adore::if_ROS::ROSParam


