◆ setpointrequest_to_mcm()
| adore::if_ROS::setpointrequest_to_mcm::setpointrequest_to_mcm |
( |
| ) |
|
|
inline |
◆ getGenerationDeltaTime()
| int adore::if_ROS::setpointrequest_to_mcm::getGenerationDeltaTime |
( |
| ) |
|
|
inline |
◆ init()
| void adore::if_ROS::setpointrequest_to_mcm::init |
( |
int |
argc, |
|
|
char ** |
argv, |
|
|
double |
rate, |
|
|
std::string |
nodename |
|
) |
| |
|
inline |
◆ milliseconds_since_epoch()
| boost::posix_time::time_duration::tick_type adore::if_ROS::setpointrequest_to_mcm::milliseconds_since_epoch |
( |
| ) |
|
|
inline |
◆ print_debug()
◆ readSetPointRequest()
| void adore::if_ROS::setpointrequest_to_mcm::readSetPointRequest |
( |
| ) |
|
|
inline |
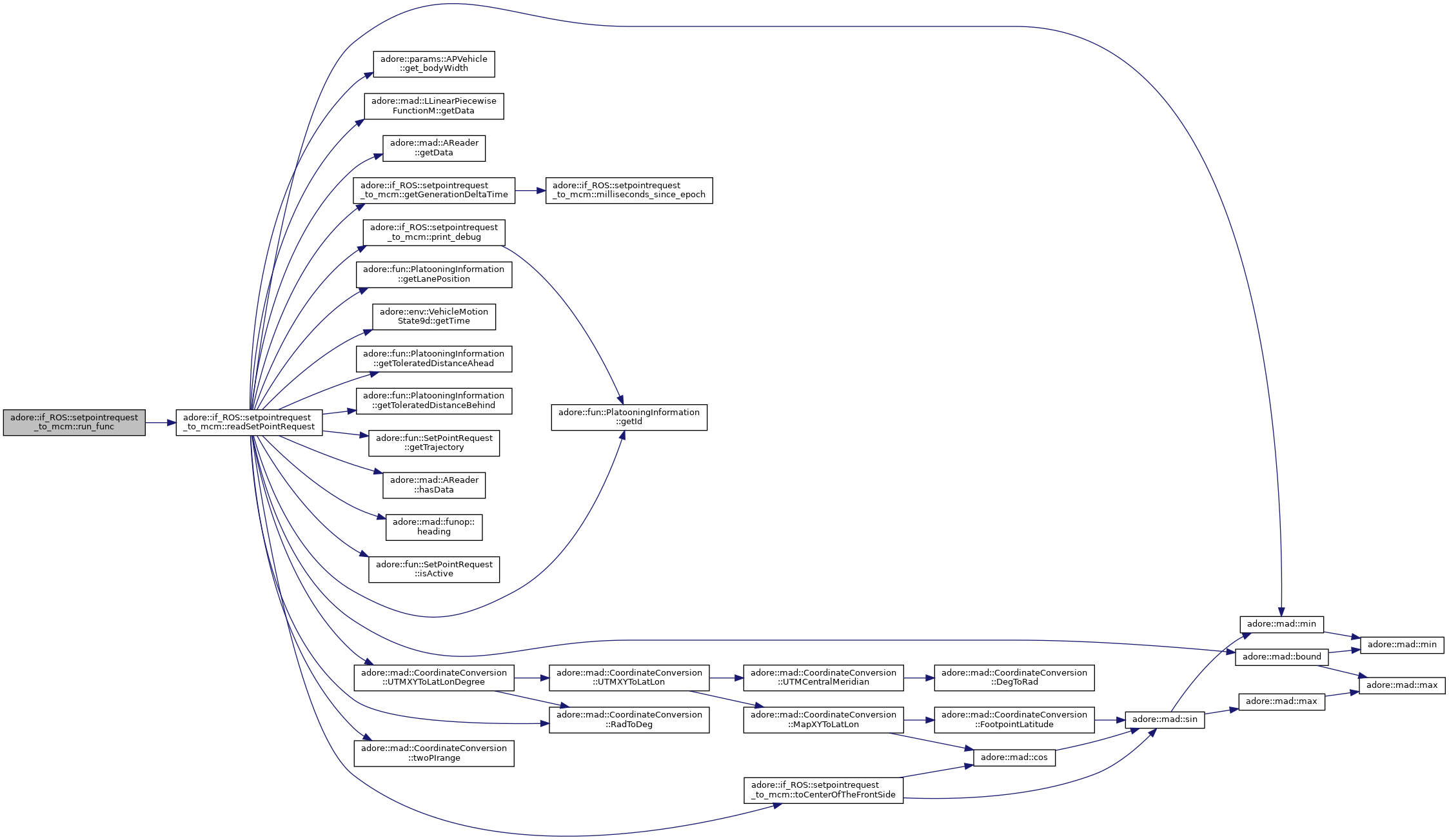
◆ run_func()
| virtual void adore::if_ROS::setpointrequest_to_mcm::run_func |
( |
| ) |
|
|
inlinevirtual |
◆ toCenterOfTheFrontSide()
| void adore::if_ROS::setpointrequest_to_mcm::toCenterOfTheFrontSide |
( |
double & |
x, |
|
|
double & |
y, |
|
|
double |
psi |
|
) |
| |
|
inline |
◆ ap_vehicle_
◆ debug_level
| int adore::if_ROS::setpointrequest_to_mcm::debug_level |
|
private |
◆ last_t_
| double adore::if_ROS::setpointrequest_to_mcm::last_t_ |
|
private |
◆ lat
| double adore::if_ROS::setpointrequest_to_mcm::lat |
|
private |
◆ lon
| double adore::if_ROS::setpointrequest_to_mcm::lon |
|
private |
◆ msg
| mcm_dmove_mcm_dmove::MCM adore::if_ROS::setpointrequest_to_mcm::msg |
|
private |
◆ ntr_reader_
◆ pl_tj
| mcm_dmove_mcm_dmove::PlannedTrajectory adore::if_ROS::setpointrequest_to_mcm::pl_tj |
|
private |
◆ platoonInformation
◆ platooningstate_reader
◆ pvehicle_
◆ setPointRequest_publisher
| ros::Publisher adore::if_ROS::setpointrequest_to_mcm::setPointRequest_publisher |
|
private |
◆ setPointRequest_publisher_sim
| ros::Publisher adore::if_ROS::setpointrequest_to_mcm::setPointRequest_publisher_sim |
|
private |
◆ southern_hemisphere
| bool adore::if_ROS::setpointrequest_to_mcm::southern_hemisphere |
|
private |
◆ spr_
◆ spr_tmp_
◆ state_
◆ state_reader_
◆ tj_point
| mcm_dmove_mcm_dmove::TrajectoryPoint adore::if_ROS::setpointrequest_to_mcm::tj_point |
|
private |
◆ utm_zone_
| int adore::if_ROS::setpointrequest_to_mcm::utm_zone_ |
|
private |
◆ v2xStationID
| int adore::if_ROS::setpointrequest_to_mcm::v2xStationID |
|
private |
◆ vehicle_a
| double adore::if_ROS::setpointrequest_to_mcm::vehicle_a |
|
private |
◆ vehicle_b
| double adore::if_ROS::setpointrequest_to_mcm::vehicle_b |
|
private |
◆ vehicle_c
| double adore::if_ROS::setpointrequest_to_mcm::vehicle_c |
|
private |
◆ vehicle_d
| double adore::if_ROS::setpointrequest_to_mcm::vehicle_d |
|
private |
The documentation for this class was generated from the following file: