|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <trafficparticipantconverter.h>
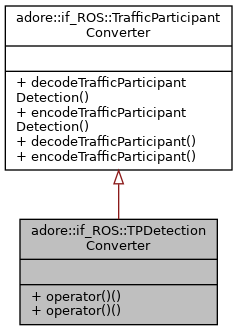
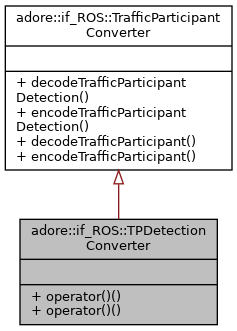
Public Member Functions | |
| void | operator() (adore_if_ros_msg::TrafficParticipantDetectionConstPtr msg, adore::env::traffic::Participant *object) |
| adore_if_ros_msg::TrafficParticipantDetection | operator() (const adore::env::traffic::Participant &object) |
Additional Inherited Members | |
 Private Member Functions inherited from adore::if_ROS::TrafficParticipantConverter Private Member Functions inherited from adore::if_ROS::TrafficParticipantConverter | |
| void | decodeTrafficParticipantDetection (const adore_if_ros_msg::TrafficParticipantDetection *msg, adore::env::traffic::Participant *object) |
| void | encodeTrafficParticipantDetection (const adore::env::traffic::Participant &object, adore_if_ros_msg::TrafficParticipantDetection *msg) |
| void | decodeTrafficParticipant (const adore_if_ros_msg::TrafficParticipant &data, adore::env::traffic::Participant *object) |
| void | encodeTrafficParticipant (const adore::env::traffic::Participant &object, adore_if_ros_msg::TrafficParticipant *msg) |
|
inline |
Convert a adore_if_ros_msg::TrafficParticipantDetection to a adore::env::traffic::Participant

|
inline |
Convert a adore::env::traffic::Participant to a adore_if_ros_msg::TrafficParticipantDetection
