|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
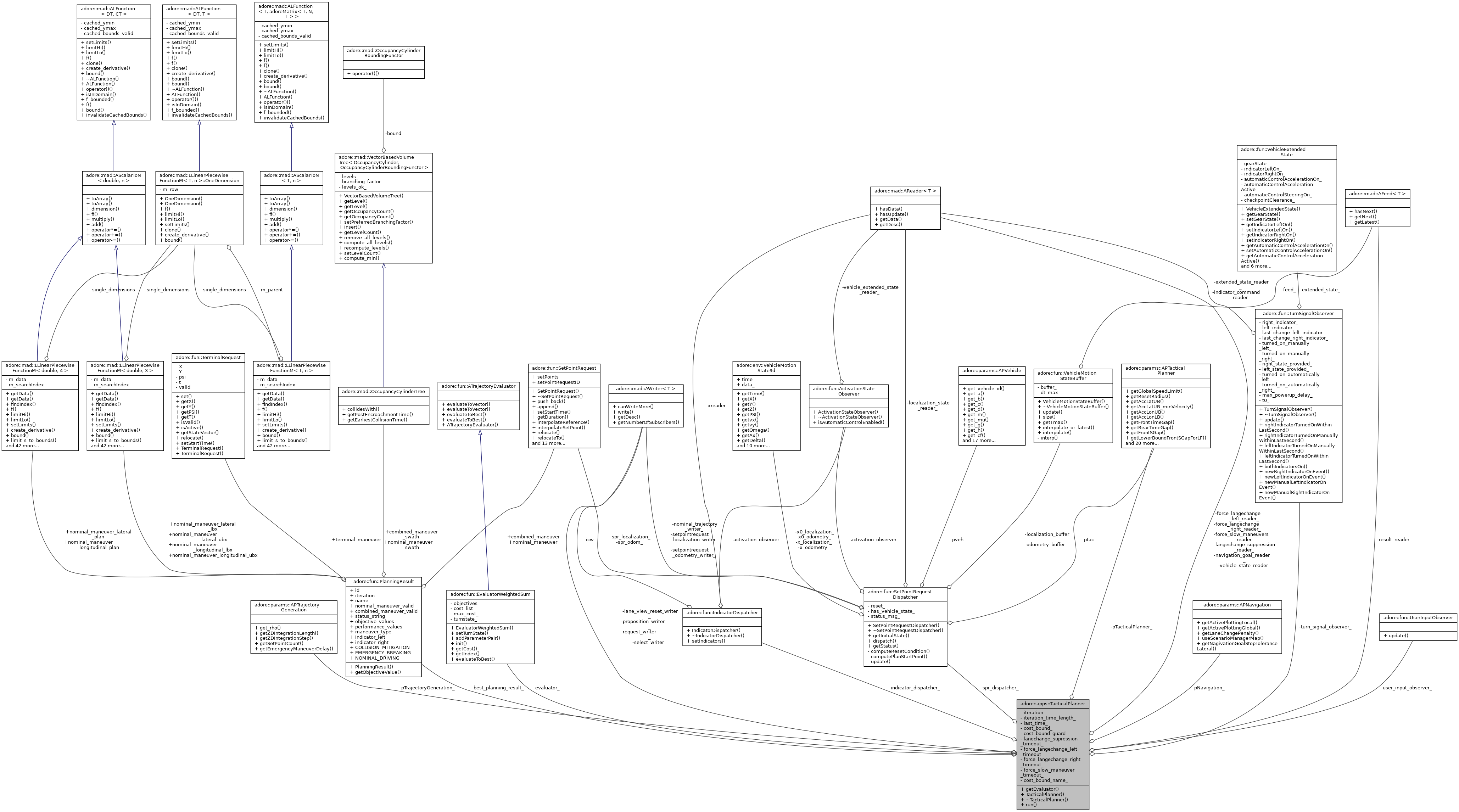
Decision making and maneuver planning. More...
#include <tactical_planner.h>
Public Member Functions | |
| adore::fun::EvaluatorWeightedSum * | getEvaluator () |
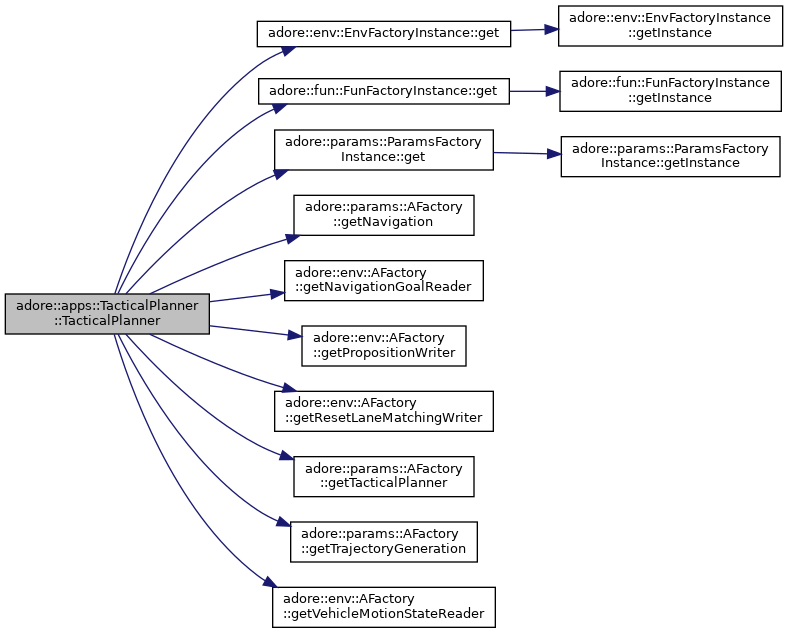
| TacticalPlanner (double iteration_time_length) | |
| constructur More... | |
| virtual | ~TacticalPlanner () |
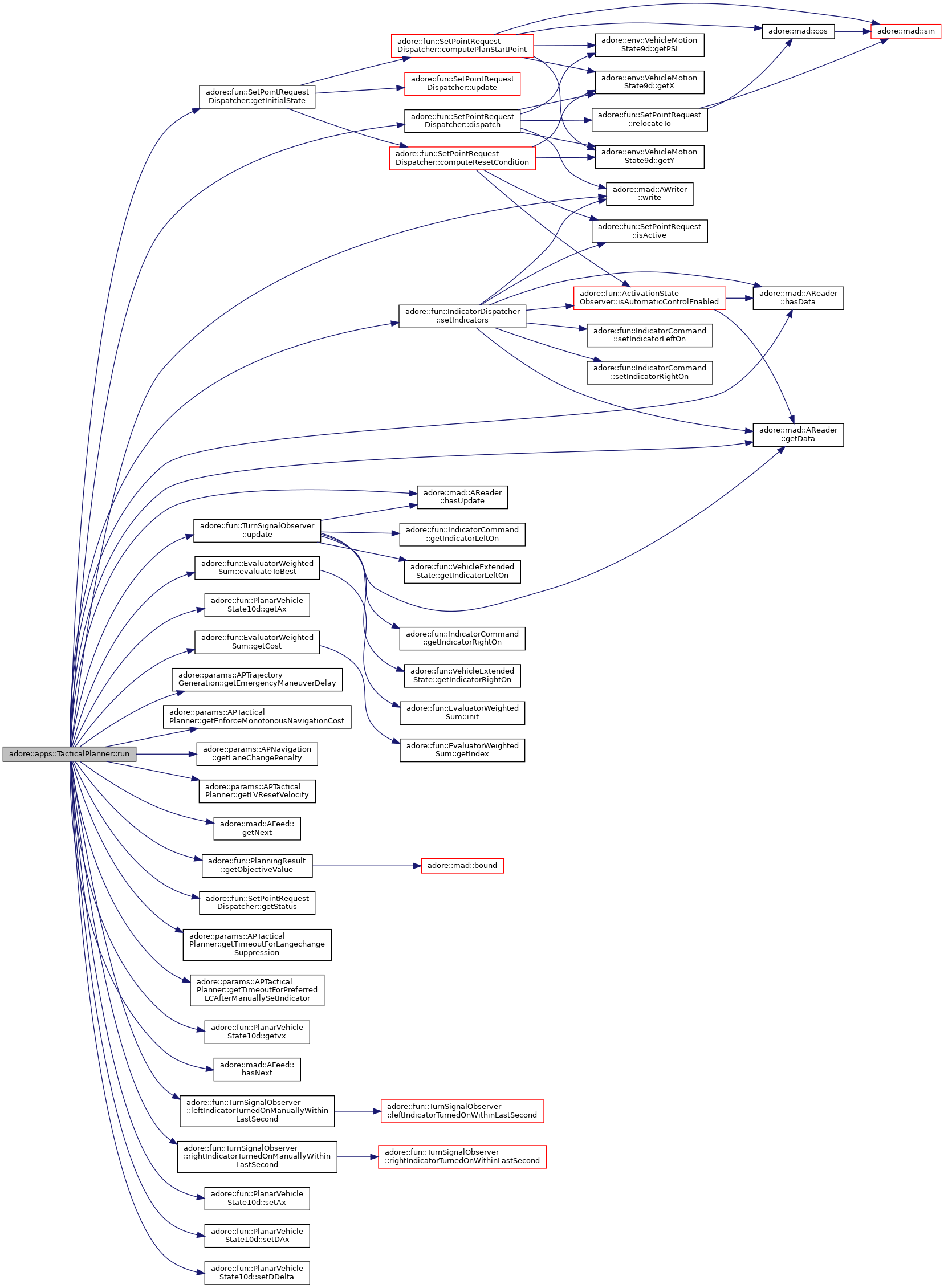
| void | run () |
| retrieve planning results, dispatch and formulate new planning request More... | |
Decision making and maneuver planning.
|
inline |
constructur
| iteration_time_length | provide information how long iteration should take: influences planning request |
|
inlinevirtual |
|
inline |

|
inline |
retrieve planning results, dispatch and formulate new planning request

|
private |
last active trajectory: might be active for >1 iterations, when no new, valid trajectory is found
|
private |
the current bound on navigation cost
|
private |
maximum value of navigation cost
|
private |
timeout for the lanechange suppression navigation cost name
|
private |
evaluate trajectories with weighted sum of individual cost functions
|
private |
|
private |
timeout for the lanechange suppression
|
private |
|
private |
timeout for force langechange left
|
private |
timeout for force langechange right
|
private |
|
private |
publish indicator command based on vehicle state and selected maneuver
|
private |
|
private |
duration of one iteration
|
private |
send signal for lane matching reset
|
private |
|
private |
|
private |
time of last planning iteration
|
private |
track navigation goal updates: on change reset cost bound
|
private |
parameters
|
private |
output proposition VALID_MANEUVER_AVAILABLE
|
private |
parameters
|
private |
parameters
|
private |
formulate planning requests for planning processes
|
private |
retrieve result of planning processes
|
private |
publish selected result of planning processes
|
private |
publish setpointrequests and retrieve initial state for next planning iteration
|
private |
tracking of turn signal changes
|
private |
handling user input
|
private |
get the time stamp of latest vehicle state