|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
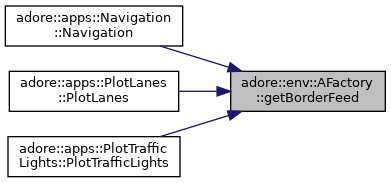
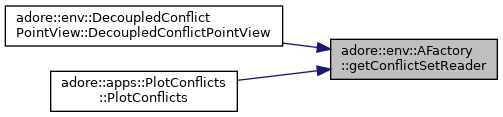
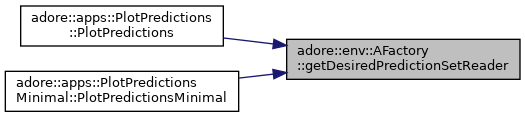
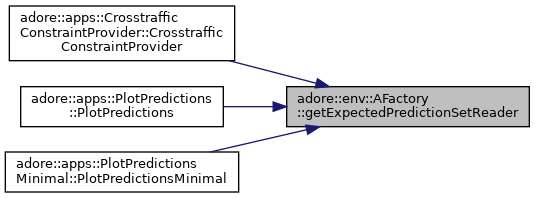
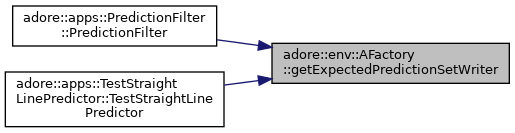
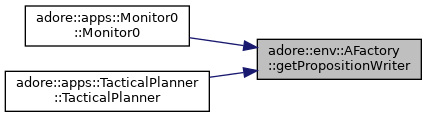
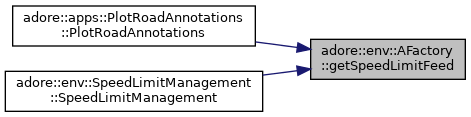
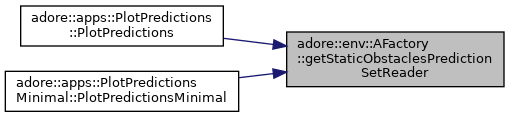
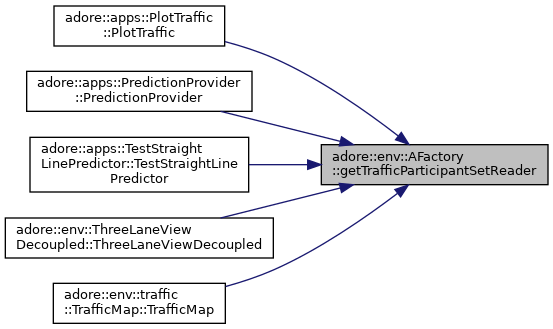
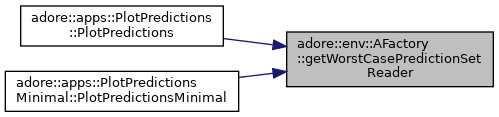
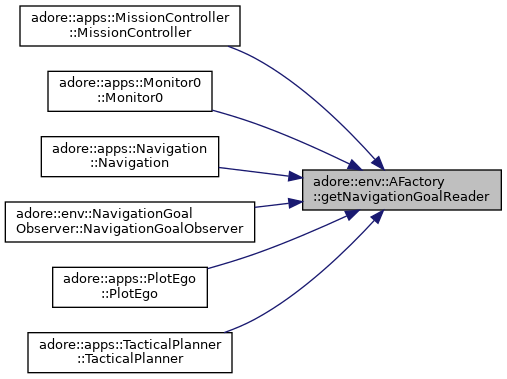
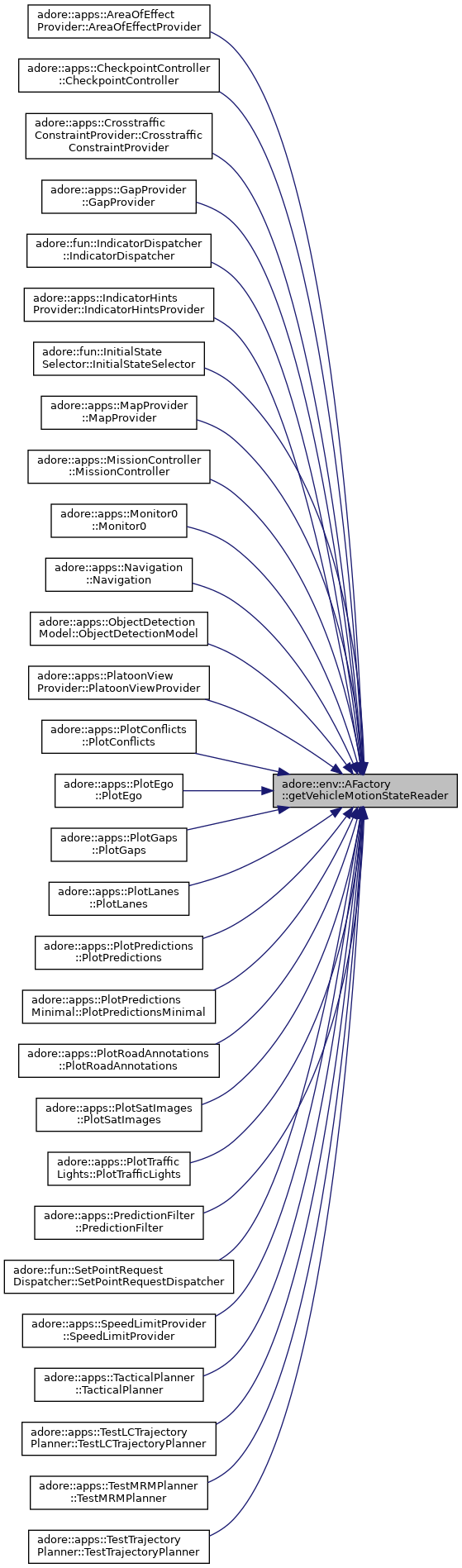
abstract factory for adore::env communication More...
#include <afactory.h>
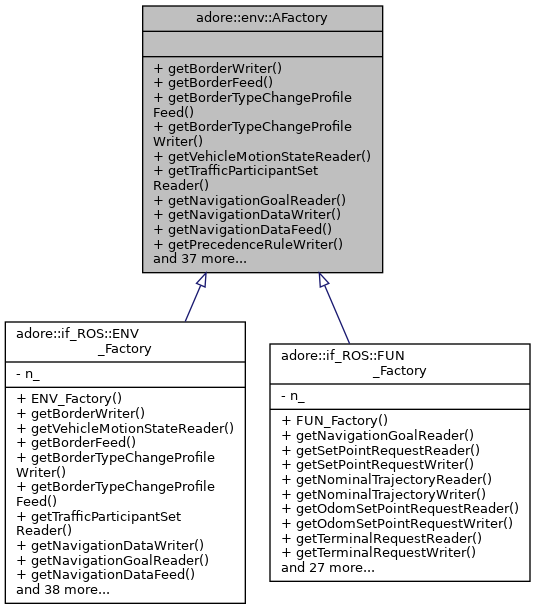
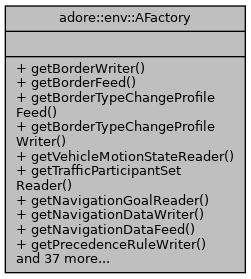
abstract factory for adore::env communication
| typedef adore::mad::AFeed<BorderTypeChangeProfile> adore::env::AFactory::TBorderTypeChangeProfileFeed |
| typedef adore::mad::AWriter<BorderTypeChangeProfile> adore::env::AFactory::TBorderTypeChangeProfileWriter |
| typedef adore::mad::AFeed<adore::env::BorderBased::CombinedLaneGeometry> adore::env::AFactory::TLaneGeometryFeed |
| typedef adore::mad::AWriter<adore::env::BorderBased::CombinedLaneGeometry> adore::env::AFactory::TLaneGeometryWriter |
| typedef adore::mad::AWriter<std::pair<adore::env::BorderBased::BorderID,double> > adore::env::AFactory::TNavgationDataWriter |
| typedef adore::mad::AFeed<std::pair<adore::env::BorderBased::BorderID,double> > adore::env::AFactory::TNavigationDataFeed |
| typedef adore::mad::AReader<OccupancyCylinderPredictionSet> adore::env::AFactory::TOCPredictionSetReader |
| typedef adore::mad::AWriter<OccupancyCylinderPredictionSet> adore::env::AFactory::TOCPredictionSetWriter |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::ENV_Factory.
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::ENV_Factory.
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::ENV_Factory.
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::ENV_Factory.
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::ENV_Factory.
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::ENV_Factory.
|
pure virtual |
Implemented in adore::if_ROS::ENV_Factory.
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::ENV_Factory.
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::FUN_Factory, and adore::if_ROS::ENV_Factory.
|
pure virtual |
Implemented in adore::if_ROS::ENV_Factory.
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::ENV_Factory.
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
Implemented in adore::if_ROS::FUN_Factory, and adore::if_ROS::ENV_Factory.
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |