|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <adore/env/borderbased/lanechangeborders.h>#include <adore/env/borderbased/bordersequence.h>#include <adore/env/borderbased/baseline.h>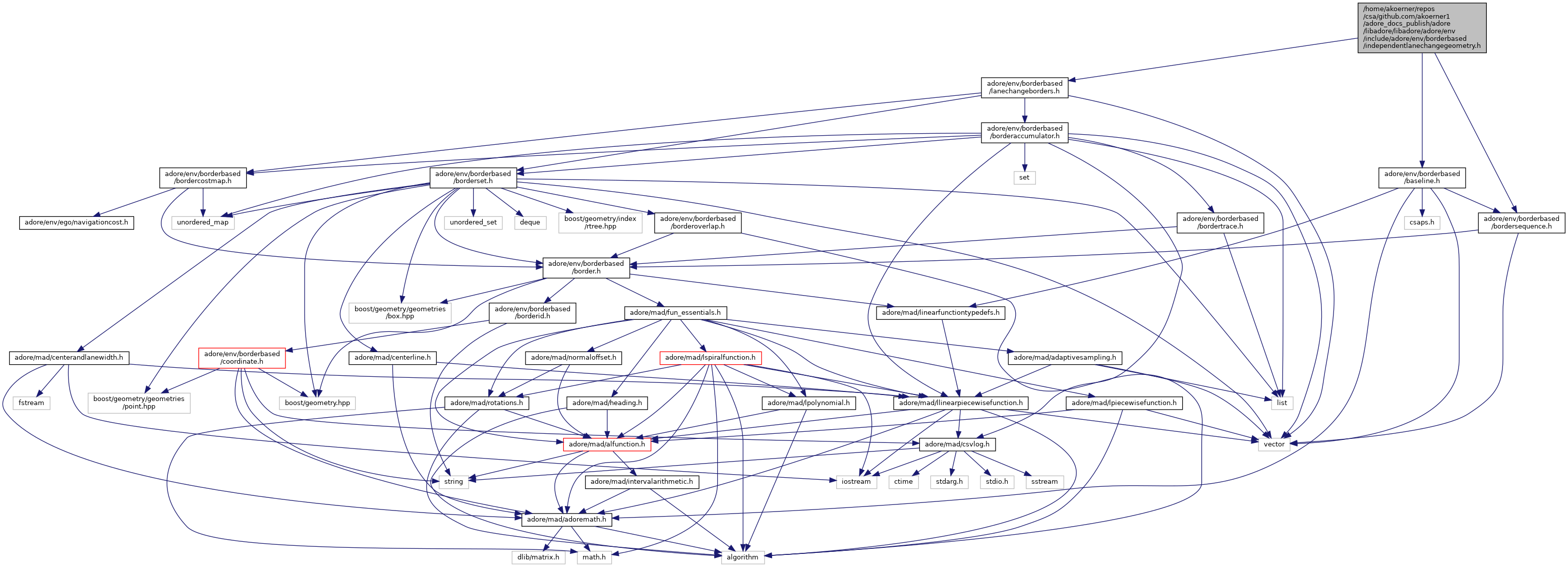
Go to the source code of this file.
Classes | |
| class | adore::env::BorderBased::IndependentLaneChangeGeometry |
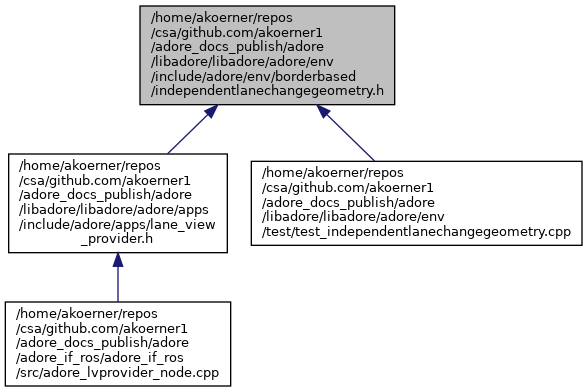
| A class for computation of the geometric information required to perform lane changes. The class name contains the term "independent", as it computes its own smooth baseline function instead of using the smooth baseline function of the lane following geometry. Downside of the independence is an increase computational effort. Upside is an improved projection in cases where target lane steeply separates after the gate. In contrast to the "normal" lc-geometry, which uses a baseline in the center of the source lane, the independent smooth baseline is situated between source and target lane. There is still a minor dependence to the lane following geometry: To compute the lane change geometry, the borders collected by the lane following geometry have to be provided. More... | |
Namespaces | |
| adore | |
| adore::env | |
| adore::env::BorderBased | |