|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
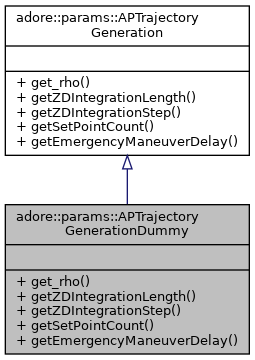
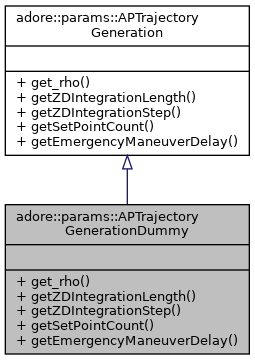
a dummy implementation for testing purposes More...
#include <ap_trajectory_generation_dummy.h>
Public Member Functions | |
| virtual double | get_rho () const |
| cor to planning point: movement of planning point shall planned by the trajectory planner More... | |
| virtual double | getZDIntegrationLength () const override |
| zero dynamics integration length More... | |
| virtual double | getZDIntegrationStep () const override |
| zero dynamics step size More... | |
| virtual int | getSetPointCount () const override |
| number of set points in set-point request More... | |
| virtual double | getEmergencyManeuverDelay () const override |
| time after which emergency maneuver kicks in More... | |
a dummy implementation for testing purposes
|
inlinevirtual |
cor to planning point: movement of planning point shall planned by the trajectory planner
Implements adore::params::APTrajectoryGeneration.
|
inlineoverridevirtual |
time after which emergency maneuver kicks in
Implements adore::params::APTrajectoryGeneration.
|
inlineoverridevirtual |
number of set points in set-point request
Implements adore::params::APTrajectoryGeneration.
|
inlineoverridevirtual |
zero dynamics integration length
Implements adore::params::APTrajectoryGeneration.
|
inlineoverridevirtual |
zero dynamics step size
Implements adore::params::APTrajectoryGeneration.