|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <factorycollection.h>

Public Member Functions | |
| FactoryCollection (ros::NodeHandle *nh=nullptr) | |
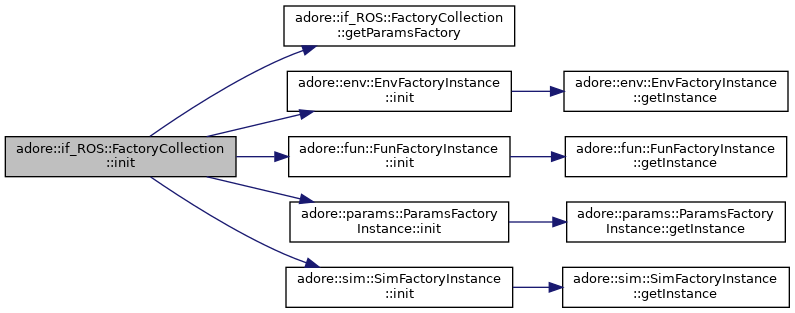
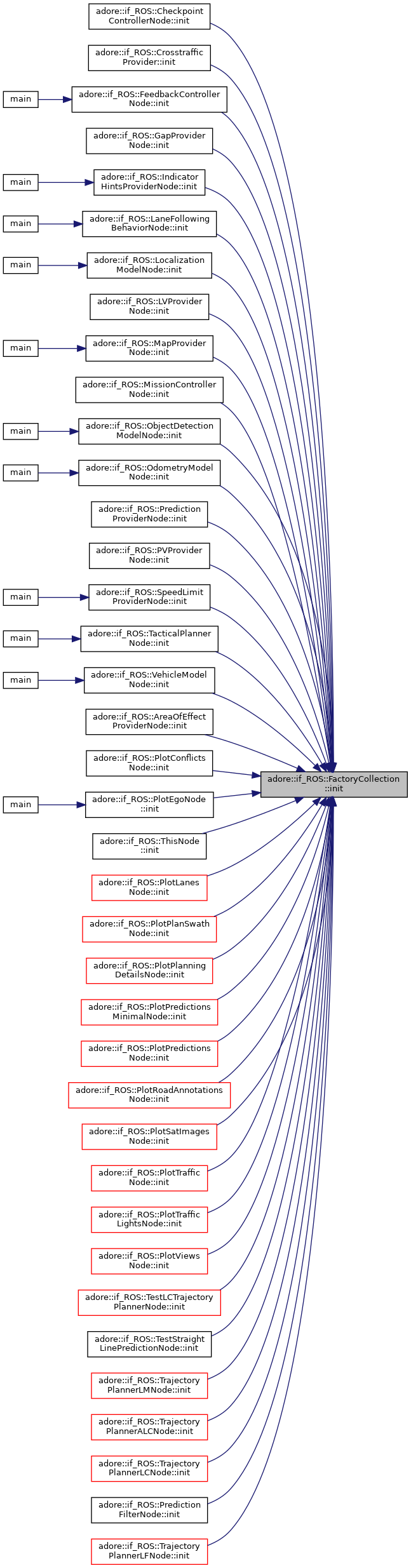
| void | init (ros::NodeHandle *nh=nullptr, std::string param_namespace="") |
| template<typename T > | |
| T * | getFactory () |
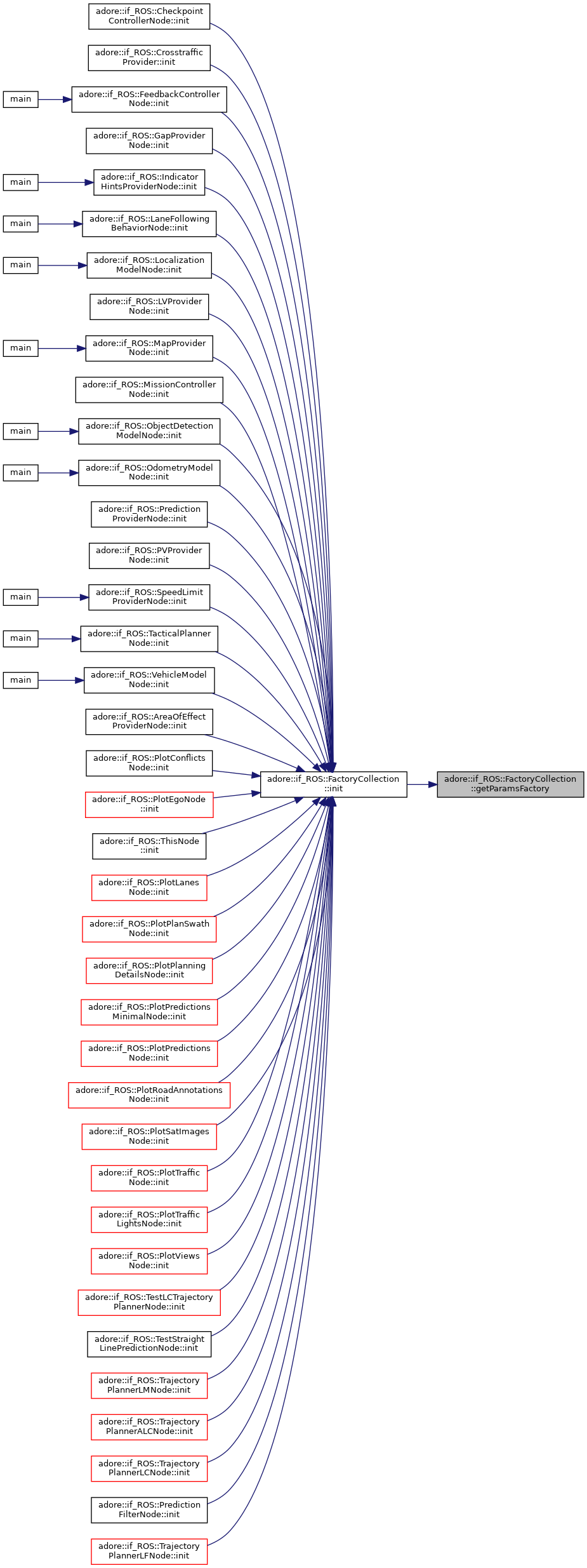
| PARAMS_Factory * | getParamsFactory (std::string prefix="") |
Private Attributes | |
| ros::NodeHandle * | nh_ |
Base class for ros nodes to make factories available
|
inline |
|
inline |
getFactory - get Factory object
|
inline |
|
inline |
|
private |