|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <navigationgoalobserver.h>
Public Member Functions | |
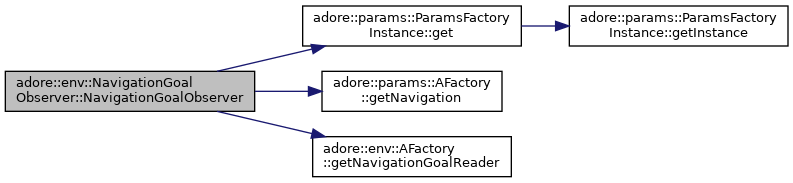
| NavigationGoalObserver (AFactory *afactory, adore::view::ALane *lfv, adore::view::ALaneChangeView *lcl, adore::view::ALaneChangeView *lcr) | |
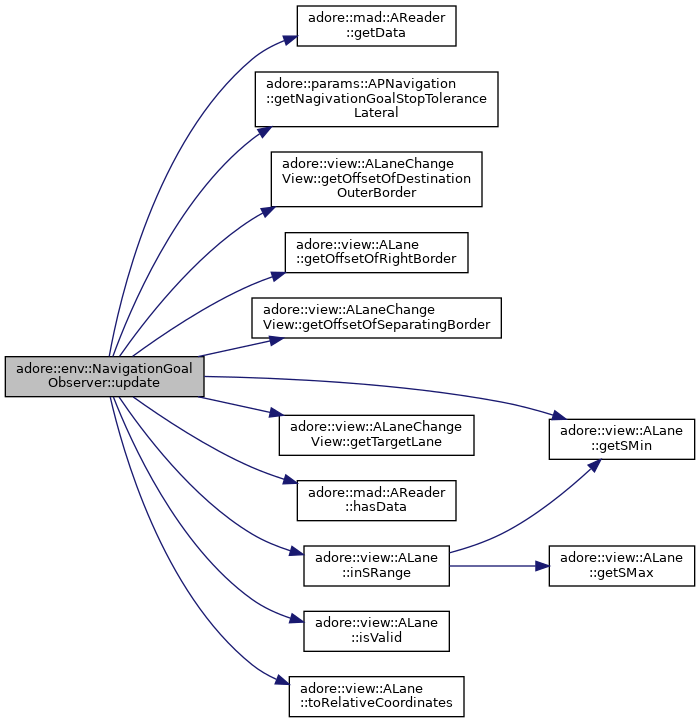
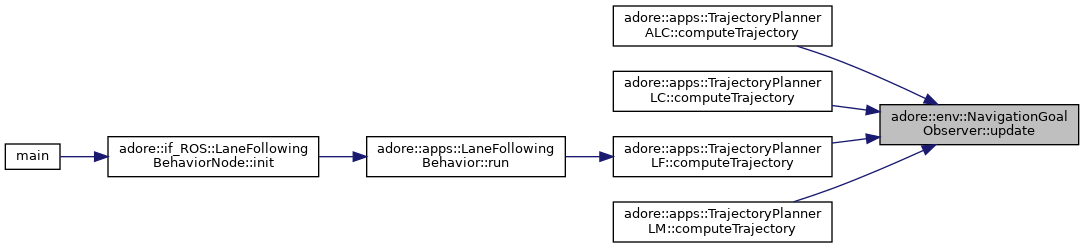
| void | update () |
| virtual const bool | isNextGoalPointFinal () const |
| virtual const bool | isNextGoalPointInView () const |
| virtual const bool | isNextGoalPointOnCurrentLane () const |
| virtual const bool | isNextGoalPointOnLaneToTheLeft () const |
| virtual const bool | isNextGoalPointOnLaneToTheRight () const |
| virtual const double | getProgress () const |
Private Attributes | |
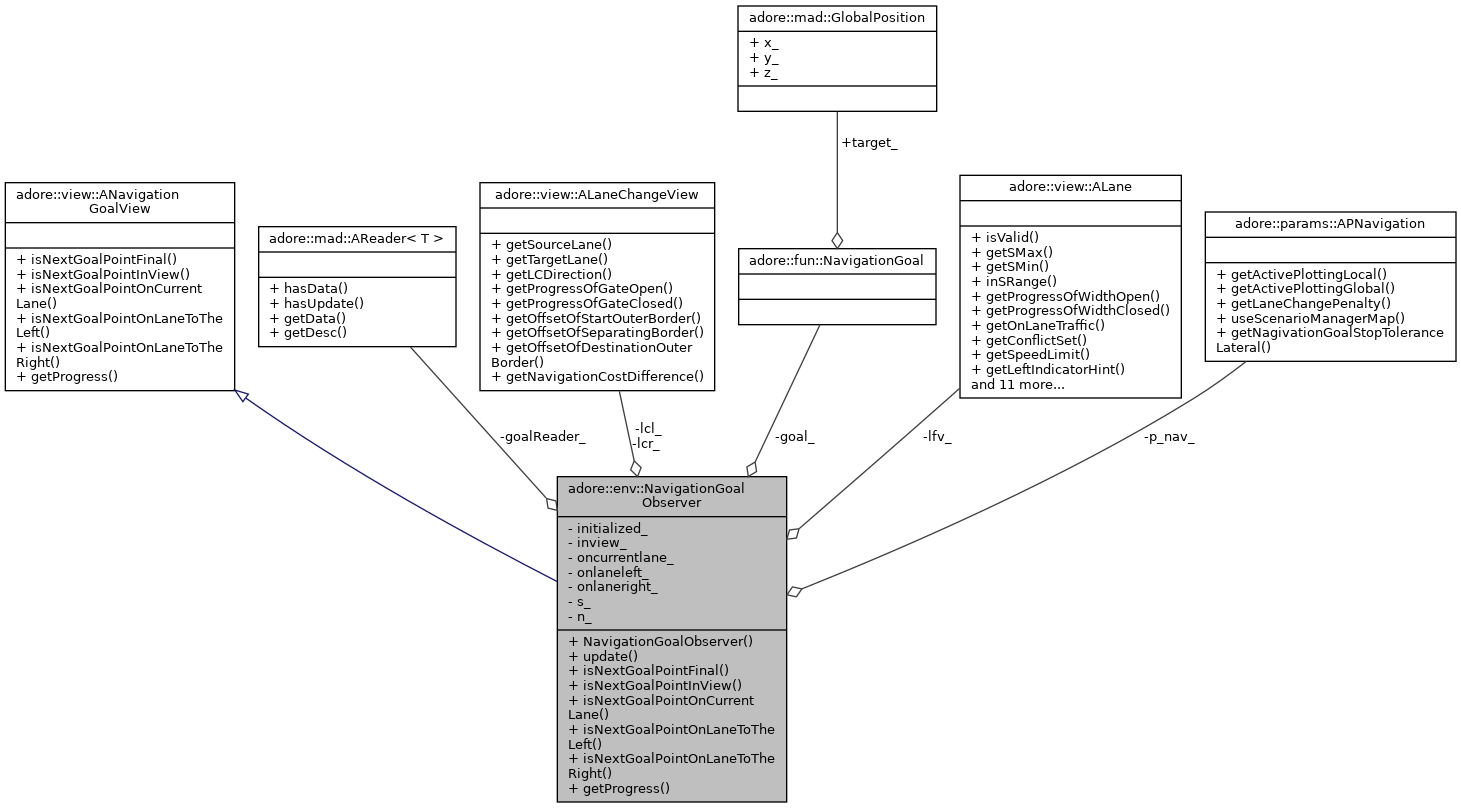
| AFactory::TNavigationGoalReader * | goalReader_ |
| adore::view::ALane * | lfv_ |
| adore::view::ALaneChangeView * | lcl_ |
| adore::view::ALaneChangeView * | lcr_ |
| bool | initialized_ |
| adore::fun::NavigationGoal | goal_ |
| bool | inview_ |
| bool | oncurrentlane_ |
| bool | onlaneleft_ |
| bool | onlaneright_ |
| double | s_ |
| double | n_ |
| adore::params::APNavigation * | p_nav_ |
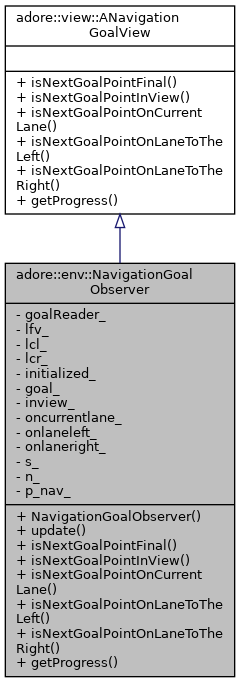
NavigationGoalObserver compares the current navigation goal to the lane following and change views. When a navigation goal comes into view, the observer provides local information via NavigationGoalView.
|
inline |
|
inlinevirtual |
returns the s-coordinate of the goal point in the current road coordinate system
Implements adore::view::ANavigationGoalView.
|
inlinevirtual |
isNextGoalPointFinal
Implements adore::view::ANavigationGoalView.
|
inlinevirtual |
isNextGoalPointInView determines whether the relation of goal-point to lane can be determined
Implements adore::view::ANavigationGoalView.
|
inlinevirtual |
is true, if the goal point is on the current lane
Implements adore::view::ANavigationGoalView.
|
inlinevirtual |
isNextGoalPointOnLaneToTheLeft returns true, if the goal point is on a neighboring lane to the left
Implements adore::view::ANavigationGoalView.
|
inlinevirtual |
isNextGoalPointOnLaneToTheRight returns true, if the goal point is on a neighboring lane to the right
Implements adore::view::ANavigationGoalView.
|
inline |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |