#include <cooperativeusersprocess.h>
◆ ListOfCooperativeUsers
◆ CooperativeUsersProcess()
◆ ~CooperativeUsersProcess()
| adore::env::CooperativeUsersProcess::~CooperativeUsersProcess |
( |
| ) |
|
|
inline |
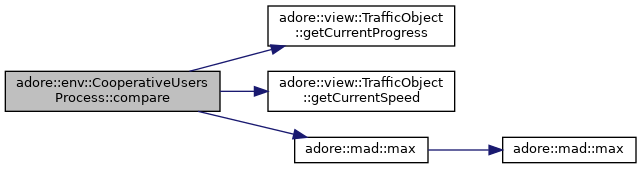
◆ compare()
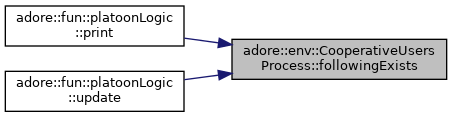
◆ followingExists()
| bool adore::env::CooperativeUsersProcess::followingExists |
( |
| ) |
|
|
inline |
◆ getBehindMansList()
◆ getDistanceToFollowing()
| double adore::env::CooperativeUsersProcess::getDistanceToFollowing |
( |
| ) |
|
|
inline |
◆ getDistanceToLeader()
| double adore::env::CooperativeUsersProcess::getDistanceToLeader |
( |
| ) |
|
|
inline |
◆ getDistanceToPreceding()
| double adore::env::CooperativeUsersProcess::getDistanceToPreceding |
( |
| ) |
|
|
inline |
◆ getEgoProgressFrontSide()
| double adore::env::CooperativeUsersProcess::getEgoProgressFrontSide |
( |
| ) |
|
|
inline |
◆ getEgoProgressRearSide()
| double adore::env::CooperativeUsersProcess::getEgoProgressRearSide |
( |
| ) |
|
|
inline |
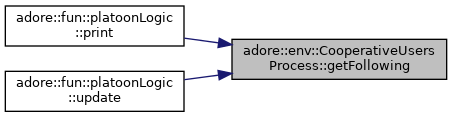
◆ getFollowing()
◆ getFollowingTimeHeadway()
| double adore::env::CooperativeUsersProcess::getFollowingTimeHeadway |
( |
| ) |
|
|
inline |
◆ getFrontMansList()
◆ getLeader()
◆ getLeaderTimeHeadway()
| double adore::env::CooperativeUsersProcess::getLeaderTimeHeadway |
( |
| ) |
|
|
inline |
◆ getPreceding()
◆ getPrecedingTimeHeadway()
| double adore::env::CooperativeUsersProcess::getPrecedingTimeHeadway |
( |
| ) |
|
|
inline |
◆ intentionPredictionPrint()
| void adore::env::CooperativeUsersProcess::intentionPredictionPrint |
( |
CooperativeUser * |
cu | ) |
|
|
inlineprivate |
◆ leaderExists()
| bool adore::env::CooperativeUsersProcess::leaderExists |
( |
| ) |
|
|
inline |
◆ leaderIsPreceding()
| bool adore::env::CooperativeUsersProcess::leaderIsPreceding |
( |
| ) |
|
|
inline |
◆ noVehicleBetweenEgoAndFollowing()
| bool adore::env::CooperativeUsersProcess::noVehicleBetweenEgoAndFollowing |
( |
| ) |
|
|
inline |
◆ noVehicleBetweenEgoAndPreceding()
| bool adore::env::CooperativeUsersProcess::noVehicleBetweenEgoAndPreceding |
( |
| ) |
|
|
inline |
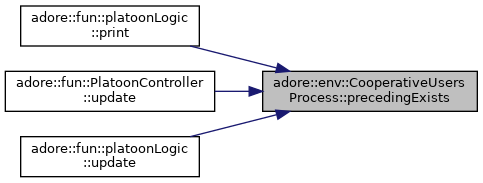
◆ precedingExists()
| bool adore::env::CooperativeUsersProcess::precedingExists |
( |
| ) |
|
|
inline |
◆ print_debug()
| void adore::env::CooperativeUsersProcess::print_debug |
( |
CooperativeUser * |
cu | ) |
|
|
inlineprivate |
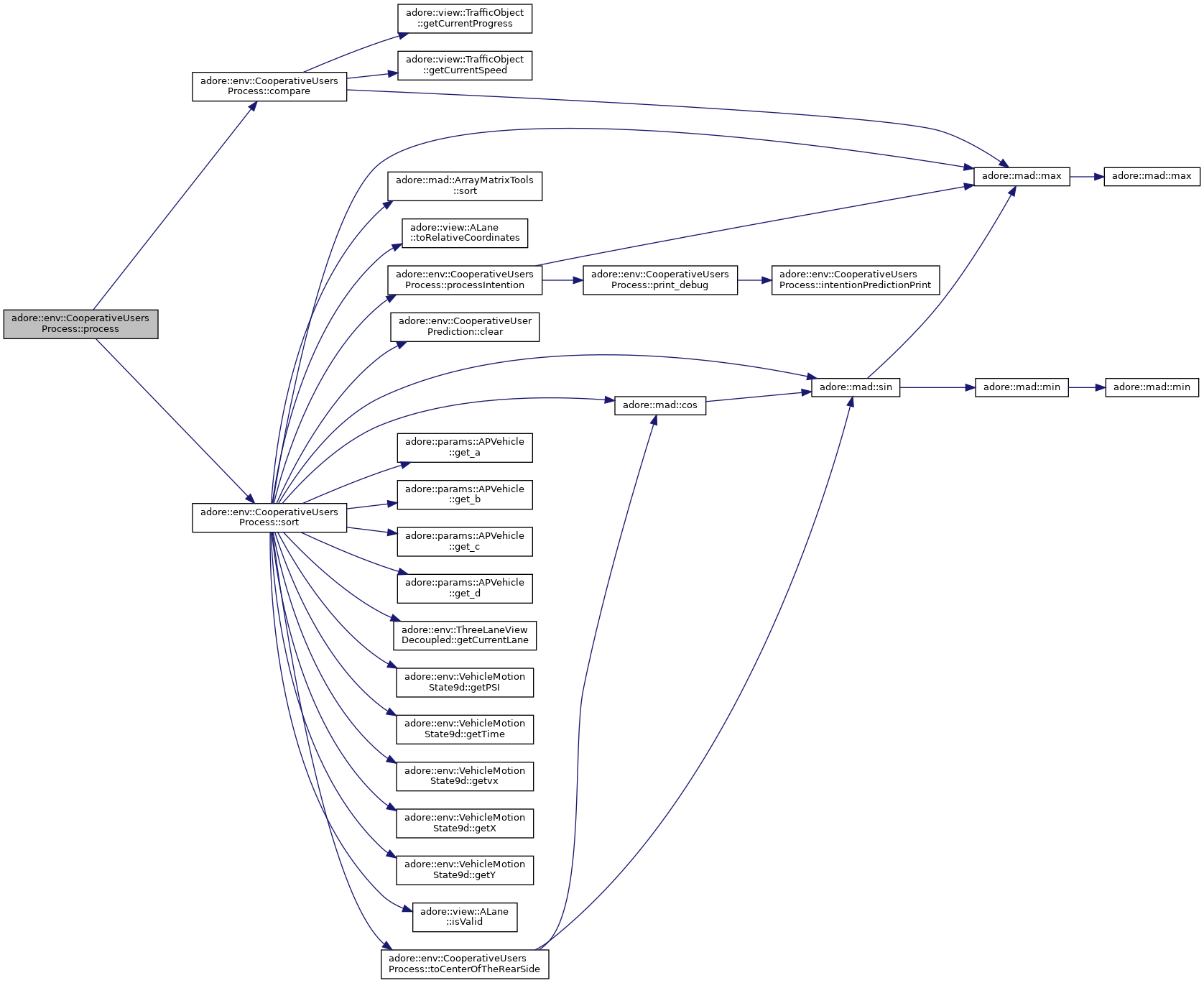
◆ process()
◆ processIntention()
| void adore::env::CooperativeUsersProcess::processIntention |
( |
CooperativeUser * |
cu | ) |
|
|
inlineprivate |
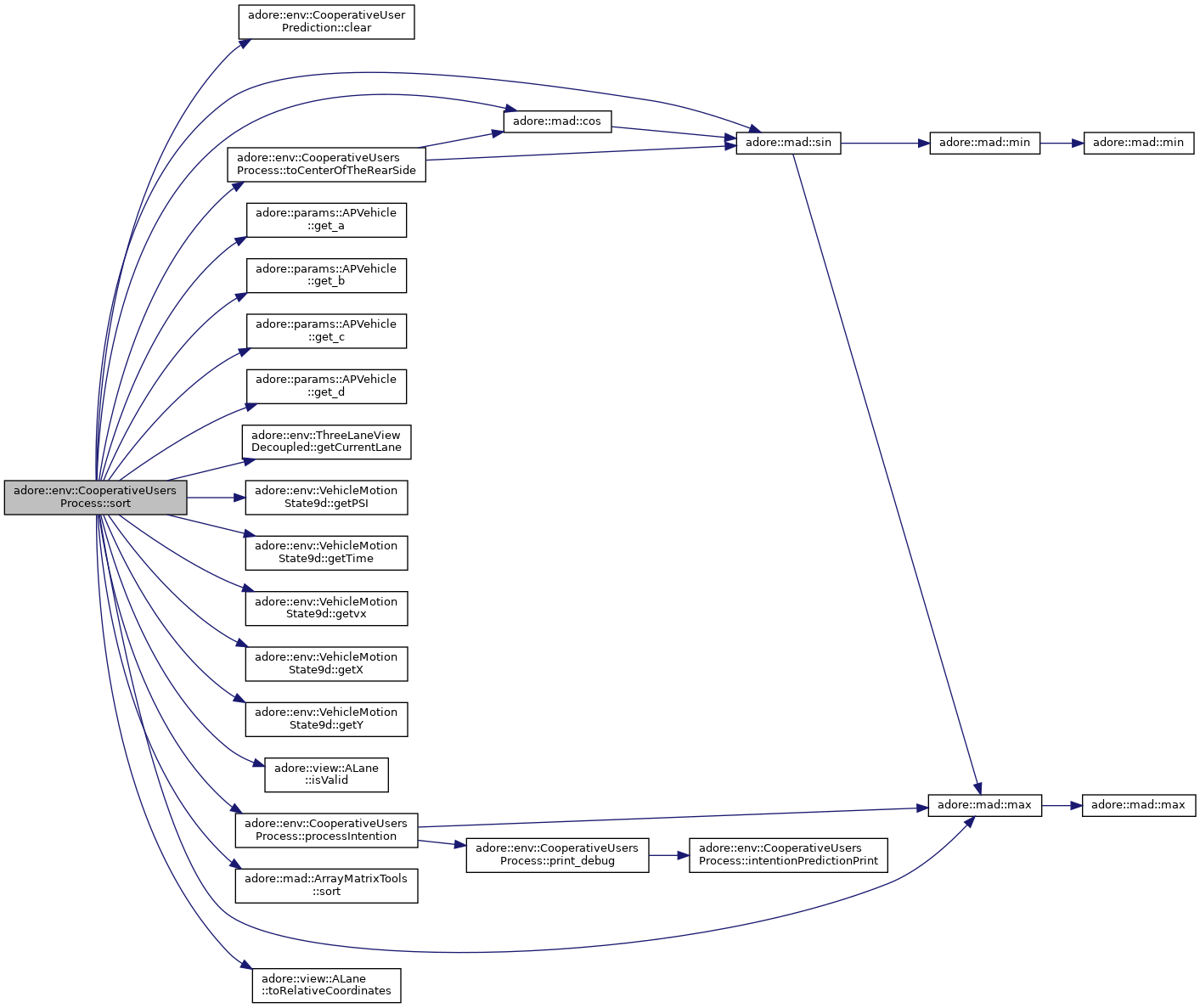
◆ sort()
◆ toCenterOfTheRearSide()
| void adore::env::CooperativeUsersProcess::toCenterOfTheRearSide |
( |
double & |
x, |
|
|
double & |
y, |
|
|
double |
psi, |
|
|
double |
vehicleLength |
|
) |
| |
|
inlineprivate |
◆ Cooperative_behindMans
◆ Cooperative_frontMans
◆ DEBUG_LEVEL
| int adore::env::CooperativeUsersProcess::DEBUG_LEVEL |
|
private |
◆ ego_progress_front_side
| double adore::env::CooperativeUsersProcess::ego_progress_front_side |
|
private |
◆ ego_progress_rear_side
| double adore::env::CooperativeUsersProcess::ego_progress_rear_side |
|
private |
◆ following
◆ following_dist_to_ego
| double adore::env::CooperativeUsersProcess::following_dist_to_ego |
|
private |
◆ following_exist
| bool adore::env::CooperativeUsersProcess::following_exist |
|
private |
◆ following_tau
| double adore::env::CooperativeUsersProcess::following_tau |
|
private |
◆ followingIsCooperative
| bool adore::env::CooperativeUsersProcess::followingIsCooperative |
|
private |
◆ frontManIsCooperative
| bool adore::env::CooperativeUsersProcess::frontManIsCooperative |
|
private |
◆ leader
◆ leader_dist_to_ego
| double adore::env::CooperativeUsersProcess::leader_dist_to_ego |
|
private |
◆ leader_exist
| bool adore::env::CooperativeUsersProcess::leader_exist |
|
private |
◆ leader_tau
| double adore::env::CooperativeUsersProcess::leader_tau |
|
private |
◆ platooningDistance
| double adore::env::CooperativeUsersProcess::platooningDistance |
|
private |
◆ possiblePlatooningTimeHeadwayRange
| double adore::env::CooperativeUsersProcess::possiblePlatooningTimeHeadwayRange |
|
private |
◆ pp_v
◆ preceding
◆ preceding_dist_to_ego
| double adore::env::CooperativeUsersProcess::preceding_dist_to_ego |
|
private |
◆ preceding_exist
| bool adore::env::CooperativeUsersProcess::preceding_exist |
|
private |
◆ preceding_tau
| double adore::env::CooperativeUsersProcess::preceding_tau |
|
private |
◆ precedingIsLeader
| bool adore::env::CooperativeUsersProcess::precedingIsLeader |
|
private |
◆ pveh
◆ three_lanes_
The documentation for this class was generated from the following file:
- /home/akoerner/repos/csa/github.com/akoerner1/adore_docs_publish/adore/libadore/libadore/adore/env/include/adore/env/traffic/cooperativeusersprocess.h