#include <trafficobject.h>
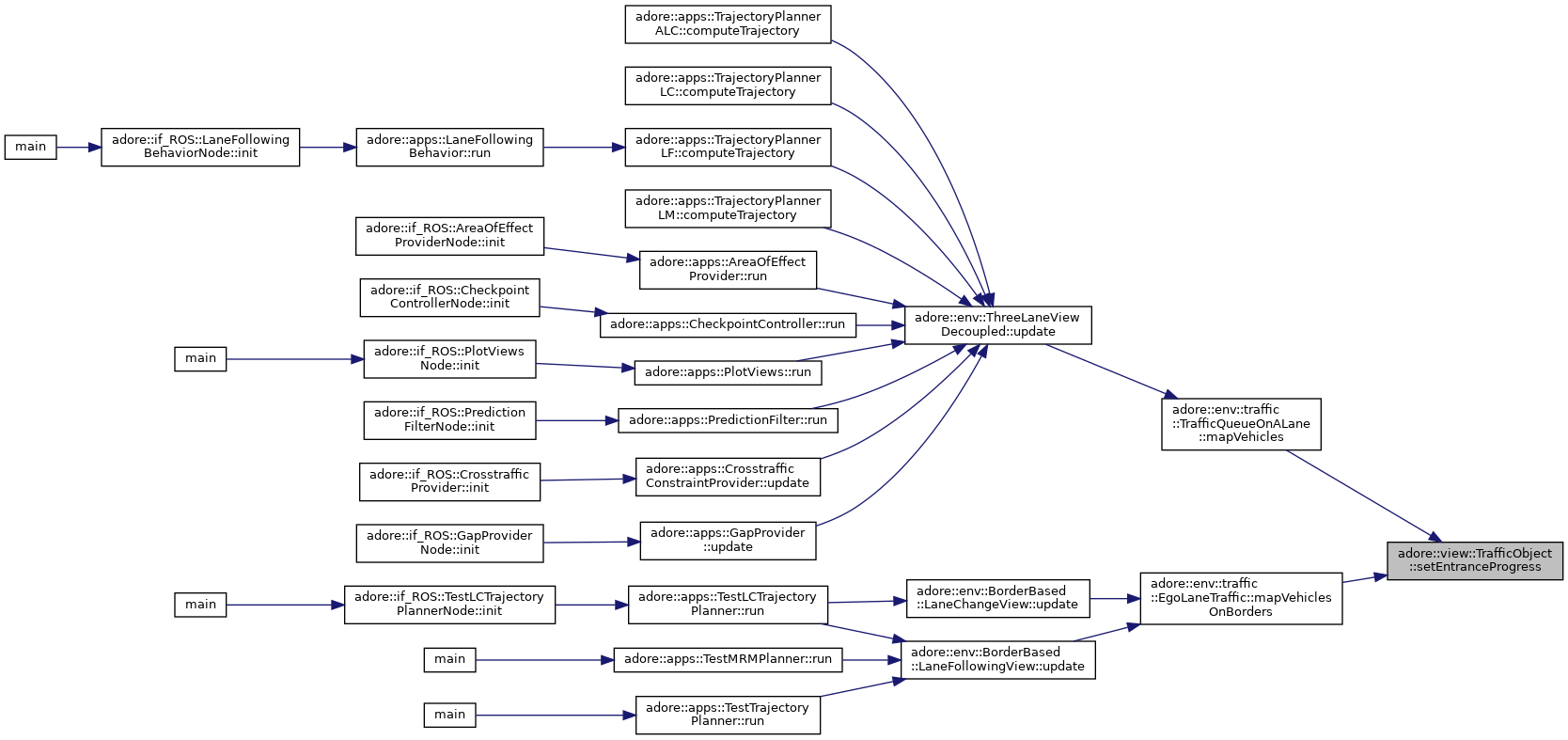
The mapping of a traffic participant to ALane.
◆ TTrackingID
◆ TV2XStationID
◆ getCurrentAcceleration()
| double adore::view::TrafficObject::getCurrentAcceleration |
( |
| ) |
const |
|
inline |
getCurrentAcceleration - returns current acceleration of a traffic object
◆ getCurrentProgress()
| double adore::view::TrafficObject::getCurrentProgress |
( |
| ) |
const |
|
inline |
getCurrentProgress - returns current progress of a traffic object along a lane or towards a conflict zone
◆ getCurrentSpeed()
| double adore::view::TrafficObject::getCurrentSpeed |
( |
| ) |
const |
|
inline |
getCurrentSpeed - returns current speed of a traffic object
◆ getEntranceProgress()
| double adore::view::TrafficObject::getEntranceProgress |
( |
| ) |
const |
|
inline |
getEntranceProgress - returns progress at which object's entrance to lane or to conflict zone will occur/is estimated to occur
◆ getEntranceSpeed()
| double adore::view::TrafficObject::getEntranceSpeed |
( |
| ) |
const |
|
inline |
getEntranceSpeed - returns speed at which object is estimated to enter lane or conflict zone
◆ getEntranceTime()
| double adore::view::TrafficObject::getEntranceTime |
( |
| ) |
const |
|
inline |
getEntranceSpeed - returns time at which object is estimated to enter lane or conflict zone
◆ getExitProgress()
| double adore::view::TrafficObject::getExitProgress |
( |
| ) |
const |
|
inline |
getExitProgress - returns progress at which object's will exit / is estimated to exit lane or conflict zone
◆ getExitTime()
| double adore::view::TrafficObject::getExitTime |
( |
| ) |
const |
|
inline |
getEntranceSpeed - returns time at which object is estimated to exit lane or conflict zone
◆ getLength()
| double adore::view::TrafficObject::getLength |
( |
| ) |
const |
|
inline |
getLength - length of the traffic object
◆ getObservationTime()
| double adore::view::TrafficObject::getObservationTime |
( |
| ) |
const |
|
inline |
get point of time at which observation was made and to which position information in this representation corresponds
◆ getTrackingID()
| TTrackingID adore::view::TrafficObject::getTrackingID |
( |
| ) |
const |
|
inline |
getTrackingID - returns an id for the traffic object. The consistency of the id over time should be maintained by sensor data fusion.
◆ getV2XStationID()
| TV2XStationID adore::view::TrafficObject::getV2XStationID |
( |
| ) |
const |
|
inline |
getV2XStationID - returns the etsi vehicle to x station id
◆ setCurrentAcceleration()
| void adore::view::TrafficObject::setCurrentAcceleration |
( |
double |
value | ) |
|
|
inline |
◆ setCurrentProgress()
| void adore::view::TrafficObject::setCurrentProgress |
( |
double |
value | ) |
|
|
inline |
◆ setCurrentSpeed()
| void adore::view::TrafficObject::setCurrentSpeed |
( |
double |
value | ) |
|
|
inline |
◆ setEntranceProgress()
| void adore::view::TrafficObject::setEntranceProgress |
( |
double |
value | ) |
|
|
inline |
◆ setEntranceSpeed()
| void adore::view::TrafficObject::setEntranceSpeed |
( |
double |
value | ) |
|
|
inline |
◆ setEntranceTime()
| void adore::view::TrafficObject::setEntranceTime |
( |
double |
value | ) |
|
|
inline |
◆ setExitProgress()
| void adore::view::TrafficObject::setExitProgress |
( |
double |
value | ) |
|
|
inline |
◆ setExitTime()
| void adore::view::TrafficObject::setExitTime |
( |
double |
value | ) |
|
|
inline |
◆ setLength()
| void adore::view::TrafficObject::setLength |
( |
double |
value | ) |
|
|
inline |
◆ setObservationTime()
| void adore::view::TrafficObject::setObservationTime |
( |
double |
value | ) |
|
|
inline |
◆ setTrackingID()
| void adore::view::TrafficObject::setTrackingID |
( |
TTrackingID |
value | ) |
|
|
inline |
◆ setV2XStationID()
| void adore::view::TrafficObject::setV2XStationID |
( |
TV2XStationID |
value | ) |
|
|
inline |
◆ currentAcceleration_
| double adore::view::TrafficObject::currentAcceleration_ |
|
private |
Current acceleration of object
◆ currentProgress_
| double adore::view::TrafficObject::currentProgress_ |
|
private |
◆ currentSpeed_
| double adore::view::TrafficObject::currentSpeed_ |
|
private |
◆ entranceProgress_
| double adore::view::TrafficObject::entranceProgress_ |
|
private |
◆ entranceSpeed_
| double adore::view::TrafficObject::entranceSpeed_ |
|
private |
◆ entranceTime_
| double adore::view::TrafficObject::entranceTime_ |
|
private |
◆ exitProgress_
| double adore::view::TrafficObject::exitProgress_ |
|
private |
◆ exitTime_
| double adore::view::TrafficObject::exitTime_ |
|
private |
◆ length_
| double adore::view::TrafficObject::length_ |
|
private |
◆ observationTime_
| double adore::view::TrafficObject::observationTime_ |
|
private |
Point of time at which observation was made and to which position information in this representation corresponds
◆ trackingID_
An id assigned by sensor data fusion, with a high likelihood of stable association of object over time
◆ v2xStationID_
The documentation for this struct was generated from the following file:
- /home/akoerner/repos/csa/github.com/akoerner1/adore_docs_publish/adore/libadore/libadore/adore/view/include/adore/view/trafficobject.h