|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <com_patterns.h>
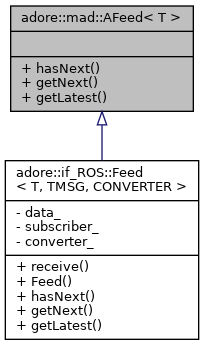
Public Member Functions | |
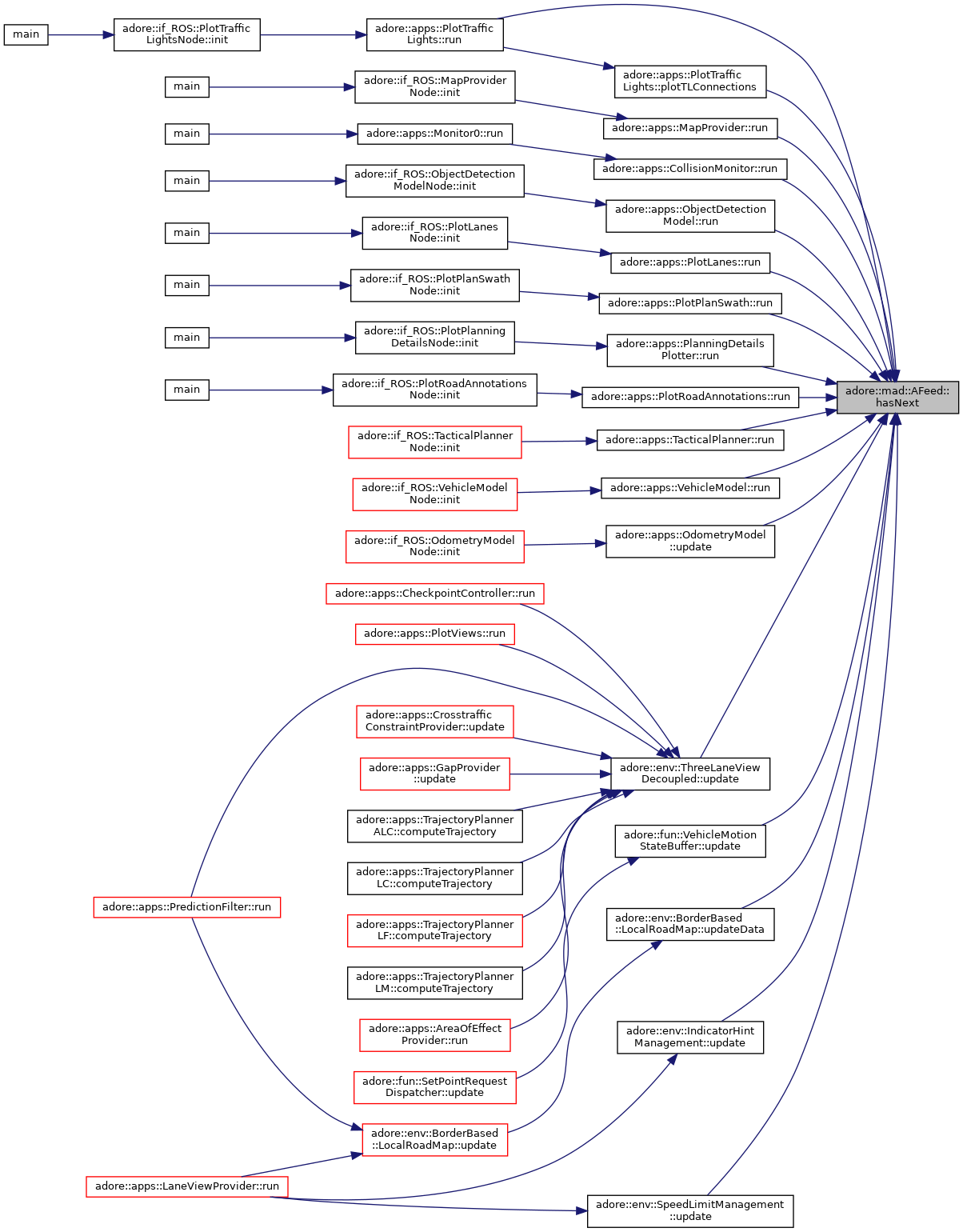
| virtual bool | hasNext () const =0 |
| virtual void | getNext (T &value)=0 |
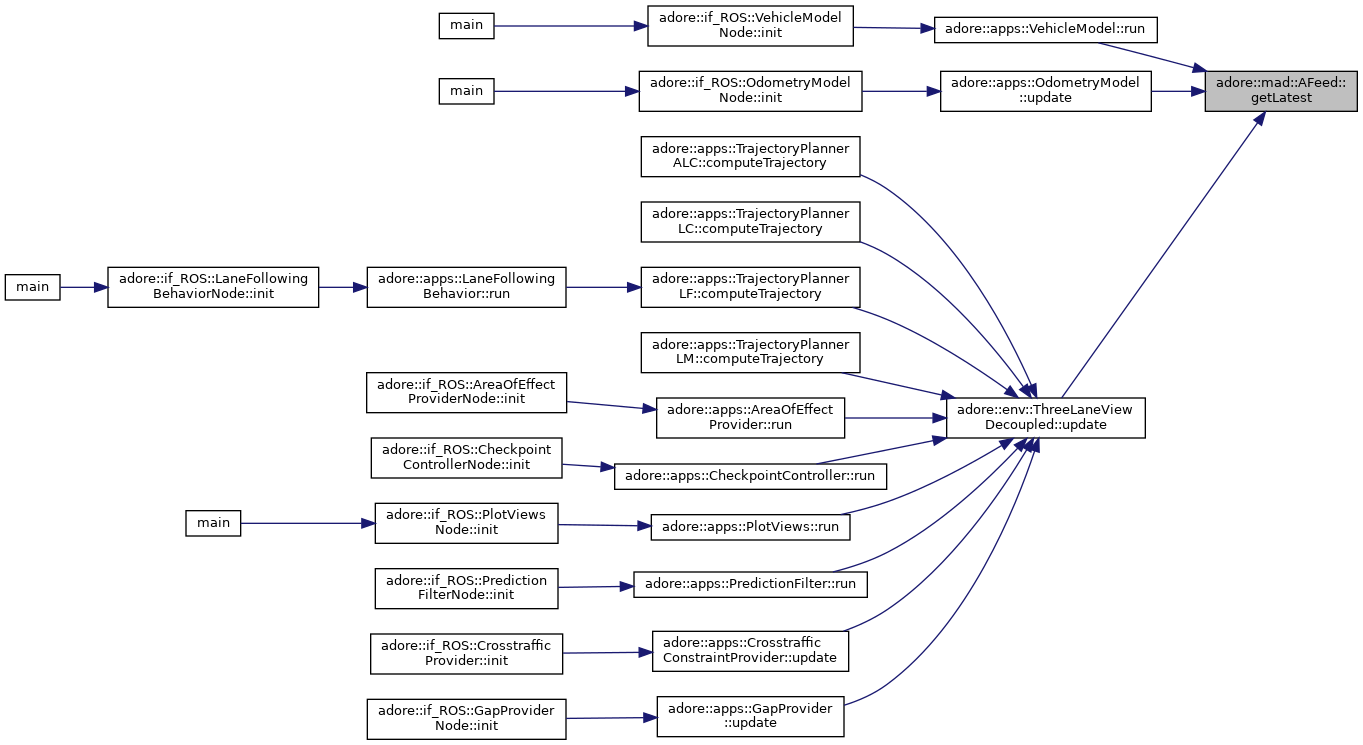
| virtual void | getLatest (T &value)=0 |
A communication pattern, which allows a client to read all messages received since last queried.
|
pure virtual |
getLatest reads the latest data element and discards all previous
Implemented in adore::env::test::TestConnectionFeed, adore::if_ROS::Feed< T, TMSG, CONVERTER >, adore::if_ROS::MotionStateFeed, and adore::if_ROS::TrafficSimulationFeed.
|
pure virtual |
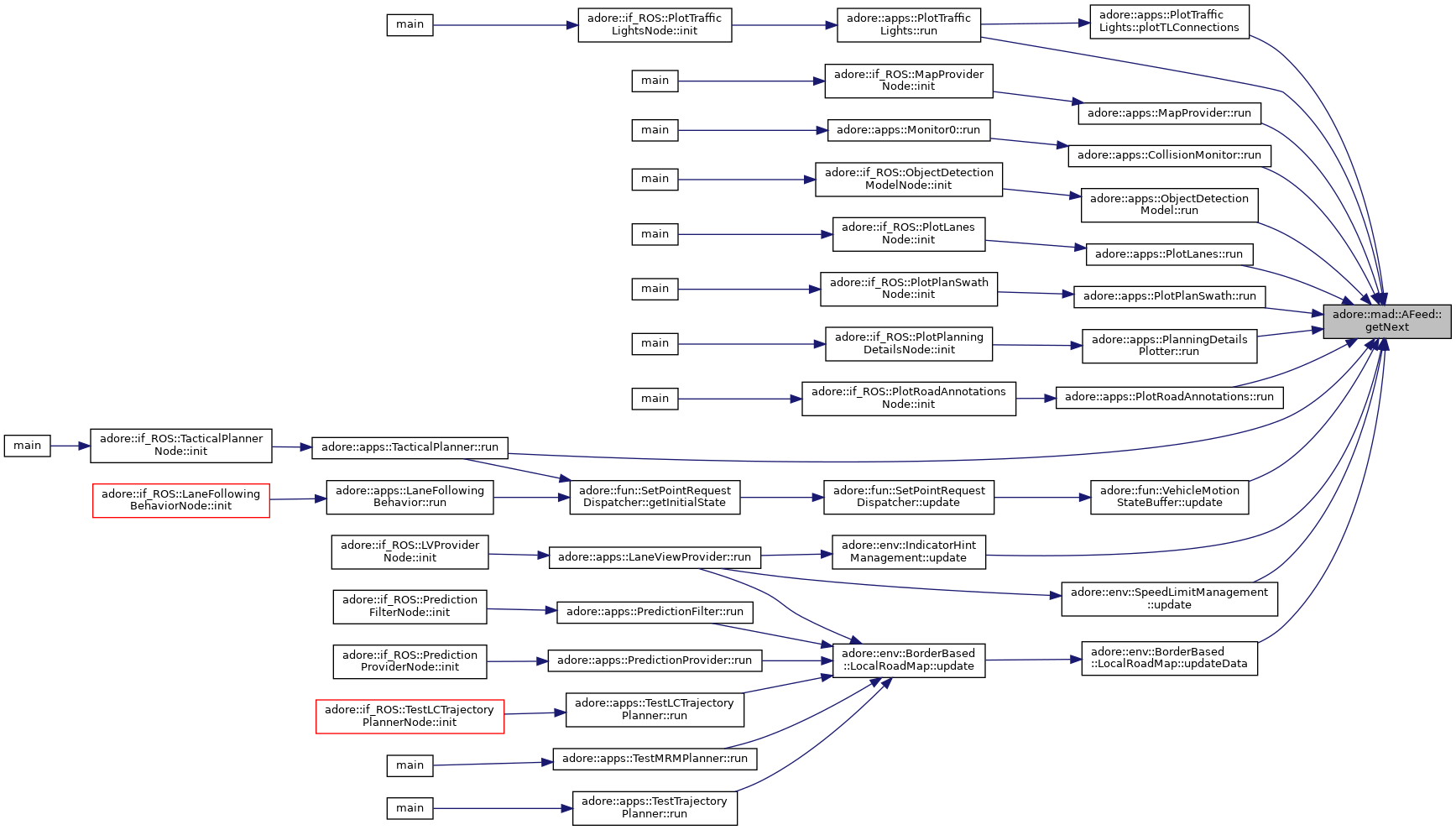
getNext reads the next data element
Implemented in adore::env::test::TestConnectionFeed, adore::if_ROS::Feed< T, TMSG, CONVERTER >, adore::if_ROS::MotionStateFeed, and adore::if_ROS::TrafficSimulationFeed.
|
pure virtual |
hasNext indicates whether there is more data to read
Implemented in adore::env::test::TestConnectionFeed, adore::if_ROS::Feed< T, TMSG, CONVERTER >, adore::if_ROS::TrafficSimulationFeed, and adore::if_ROS::MotionStateFeed.