|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
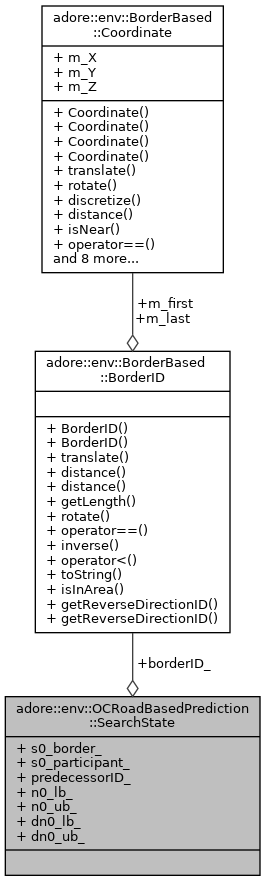
Public Attributes | |
| double | s0_border_ |
| double | s0_participant_ |
| adore::env::BorderBased::BorderID | borderID_ |
| int | predecessorID_ |
| double | n0_lb_ |
| double | n0_ub_ |
| double | dn0_lb_ |
| double | dn0_ub_ |
| adore::env::BorderBased::BorderID adore::env::OCRoadBasedPrediction::SearchState::borderID_ |
the border to be considered
| double adore::env::OCRoadBasedPrediction::SearchState::dn0_lb_ |
initial tangential velocity lower bound
| double adore::env::OCRoadBasedPrediction::SearchState::dn0_ub_ |
initial tangential velocity upper bound
| double adore::env::OCRoadBasedPrediction::SearchState::n0_lb_ |
initial tangential distance lower bound
| double adore::env::OCRoadBasedPrediction::SearchState::n0_ub_ |
initial tangential distance upper bound
| int adore::env::OCRoadBasedPrediction::SearchState::predecessorID_ |
predecessor branch id
| double adore::env::OCRoadBasedPrediction::SearchState::s0_border_ |
where to start on border
| double adore::env::OCRoadBasedPrediction::SearchState::s0_participant_ |
how many m has the participant progressed, when it starts on border