|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include "adore/env/borderbased/lanepositionedobjectset.h"#include "adore/env/borderbased/stopline.h"#include <deque>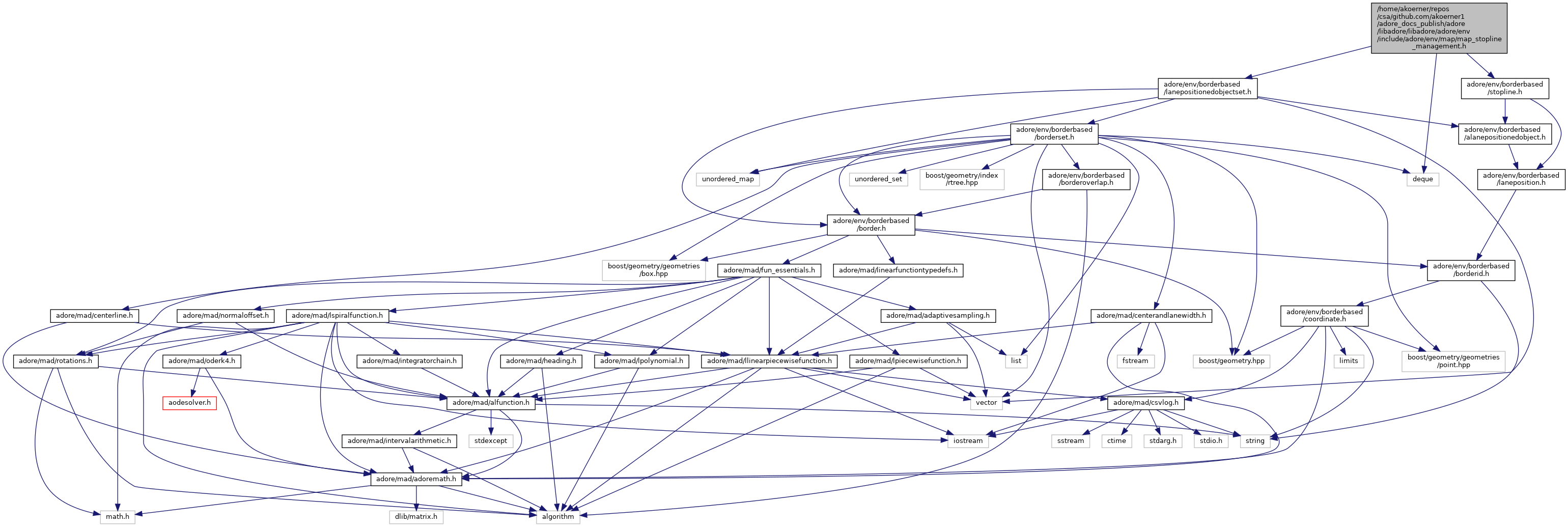
Go to the source code of this file.
Classes | |
| class | adore::env::MapStopLineManagement |
| manage new and outdated stop lines based on newly visible and no longer visible borders and the last state of the object More... | |
Namespaces | |
| adore | |
| adore::env | |