|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <adore/mad/alfunction.h>#include <adore/mad/adoremath.h>#include <adore/mad/csvlog.h>#include <vector>#include <algorithm>#include <iostream>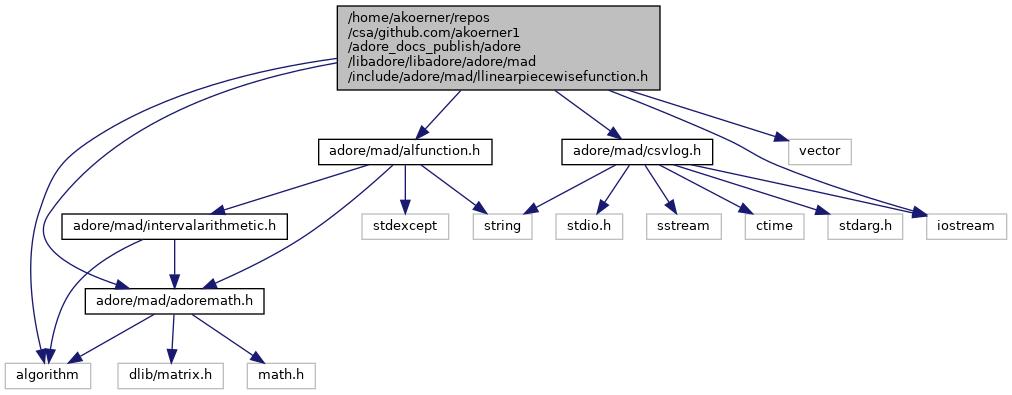
Go to the source code of this file.
Namespaces | |
| adore | |
| adore::mad | |
Functions | |
| template<typename T , int dout, int din> | |
| LLinearPiecewiseFunctionM< T, dout > | adore::mad::getSubFunction (LLinearPiecewiseFunctionM< T, din > &fin, int dimensions[dout]) |
| template<typename T , int n_dfun, int n_base, int n_normal, int n_target> | |
| void | adore::mad::defineDistanceMap2d (LLinearPiecewiseFunctionM< T, n_dfun > *dfun, int id, LLinearPiecewiseFunctionM< T, n_base > *base, LLinearPiecewiseFunctionM< T, n_normal > *normal, LLinearPiecewiseFunctionM< T, n_target > *target, T guard, LLinearPiecewiseFunctionM< T, 1 > *guardfun=0) |