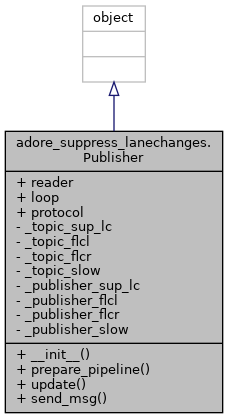
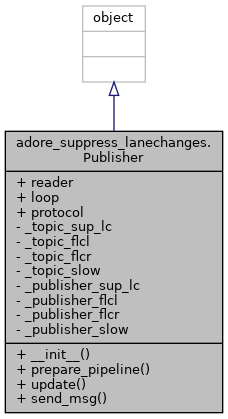
◆ __init__()
| def adore_suppress_lanechanges.Publisher.__init__ |
( |
|
self | ) |
|
◆ prepare_pipeline()
| def adore_suppress_lanechanges.Publisher.prepare_pipeline |
( |
|
self | ) |
|
◆ send_msg()
| def adore_suppress_lanechanges.Publisher.send_msg |
( |
|
self, |
|
|
|
topic_name |
|
) |
| |
◆ update()
| def adore_suppress_lanechanges.Publisher.update |
( |
|
self | ) |
|
◆ _publisher_flcl
| adore_suppress_lanechanges.Publisher._publisher_flcl |
|
private |
◆ _publisher_flcr
| adore_suppress_lanechanges.Publisher._publisher_flcr |
|
private |
◆ _publisher_slow
| adore_suppress_lanechanges.Publisher._publisher_slow |
|
private |
◆ _publisher_sup_lc
| adore_suppress_lanechanges.Publisher._publisher_sup_lc |
|
private |
◆ _topic_flcl
| adore_suppress_lanechanges.Publisher._topic_flcl |
|
private |
◆ _topic_flcr
| adore_suppress_lanechanges.Publisher._topic_flcr |
|
private |
◆ _topic_slow
| adore_suppress_lanechanges.Publisher._topic_slow |
|
private |
◆ _topic_sup_lc
| adore_suppress_lanechanges.Publisher._topic_sup_lc |
|
private |
◆ loop
| adore_suppress_lanechanges.Publisher.loop |
◆ protocol
| adore_suppress_lanechanges.Publisher.protocol |
◆ reader
| adore_suppress_lanechanges.Publisher.reader |
The documentation for this class was generated from the following file: