|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <conflictset.h>
Public Member Functions | |
| virtual bool | isValid () const =0 |
| virtual std::vector< ConflictArea * > | getConflictAreas () const =0 |
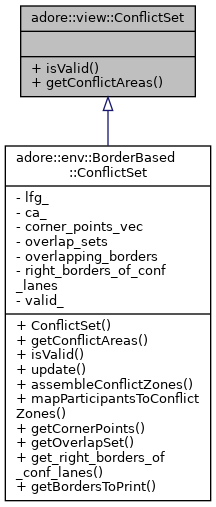
ConflictSet - a set of conflict zones, ordered by progress along a lane
|
pure virtual |
getConflictAreas - return vector of view::ConflictArea objects
Implemented in adore::env::BorderBased::ConflictSet.
|
pure virtual |
isValid - return true if representation of lane is valid
Implemented in adore::env::BorderBased::ConflictSet.