|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <boundingvolumes.h>
Public Member Functions | |
| PlaneSequence3d () | |
| PlaneSequence3d (float *p, float *n, int k) | |
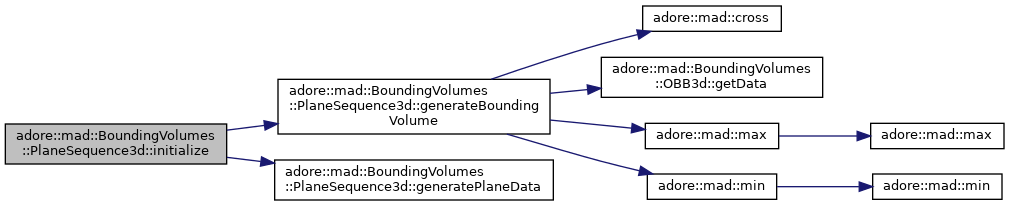
| void | initialize (float *p, float *n, int k) |
| ~PlaneSequence3d () | |
| bool | isCollisionFree (OBB3d *other) |
| bool | isCollisionFree (OBBTree3d *other) |
| OBB3d * | getOBB () |
| float * | getData () |
| int | size () |
Private Member Functions | |
| bool | isCollisionFree_detailedTest (OBB3d *other) |
| void | generatePlaneData (float *p, float *n) |
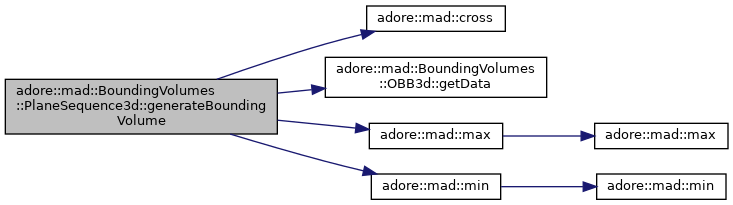
| void | generateBoundingVolume (float *p, float *n) |
Private Attributes | |
| float | v [Nmax *3 *3] |
| int | N |
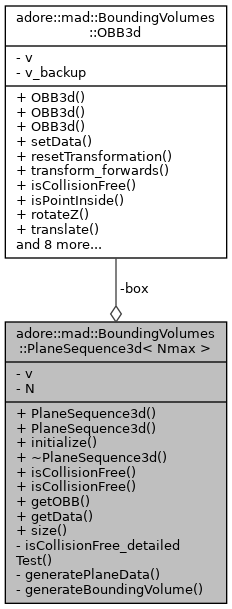
| OBB3d | box |
A sequence of 2d planes in 3d space, which can be used to represent constraints
|
inline |
p\in R^{3xk} - point sequence n\in R^{3xk} - normals sticking out of point sequence to define faces
|
inline |
constructor, initialize with an array of corner points p and an array of surface normals n

|
inline |
|
inlineprivate |

|
inlineprivate |

|
inline |
|
inline |
|
inline |

|
inline |
test for collisions with an OBB3d


|
inline |
|
inlineprivate |


|
inline |
|
private |
oriented box, which bounds the complete sequence of planes
|
private |
number of initialized planes
|
private |
an array [ c,e0,e1, c,e0,e1, c,e0,e1] containing corner point and edges of planes 0..N
