|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <vehiclemotionstate9d.h>
Public Member Functions | |
| VehicleMotionState9d () | |
| double | getTime () const |
| double | getX () const |
| double | getY () const |
| double | getZ () const |
| double | getPSI () const |
| double | getvx () const |
| double | getvy () const |
| double | getOmega () const |
| double | getAx () const |
| double | getDelta () const |
| void | setTime (double value) |
| void | setX (double value) |
| void | setY (double value) |
| void | setZ (double value) |
| void | setPSI (double value) |
| void | setvx (double value) |
| void | setvy (double value) |
| void | setOmega (double value) |
| void | setAx (double value) |
| void | setDelta (double value) |
| template<class T , typename = std::enable_if_t< std::is_same<T,PlanarVehicleState10d>::value>> | |
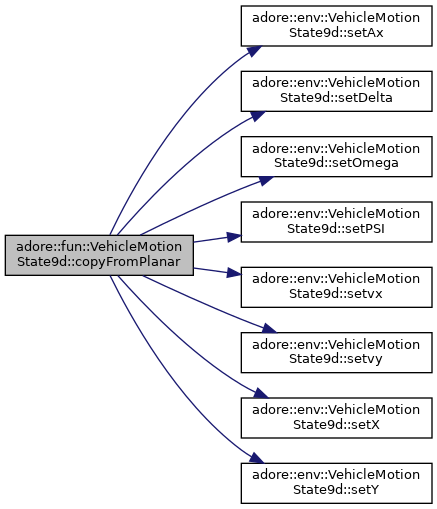
| void | copyFromPlanar (const T &other) |
| Offers the possibility to copy relevant fields from a PlanarVehicleState10d to VehicleMotionState9d. More... | |
Public Attributes | |
| double | time_ |
| adoreMatrix< double, 9, 1 > | data_ |
Structure which contains vehicle motion states and time, used as observed state, input to planning and control modules. [ pX, pY, pZ, psi, vx, vy at COR, omega, ax, delta, ]
|
inline |
|
inline |
Offers the possibility to copy relevant fields from a PlanarVehicleState10d to VehicleMotionState9d.
this construct is used to circumvent issues that arise from the mainly header-only nature of the framework while a copy constructor for the reverse copy order already existed, this new function was not possible to implement in the same way due to issues with cyclic header dependencies
| T | |
| std::enable_if_t< | std::is_same<T,PlanarVehicleState10d>::value> |
| other | a PlanarVehicleState10d object |
|
inline |
returns acceleration in x coordinate
|
inline |
returns steering angle
|
inline |
returns omega (yaw rate)
|
inline |
returns PSI (heading)
|
inline |
returns time
|
inline |
returns velocity in x coordinate
|
inline |
returns velocity in y coordinate
|
inline |
returns X
|
inline |
returns Y
|
inline |
returns Z
|
inline |
to set the Ax (acceleration in x coordinate)
| value | is Ax |
|
inline |
to set the Delta (steering angle)
| value | is Delta |
|
inline |
to set the Omega (yaw rate)
| value | is Omega |
|
inline |
to set the PSI (heading)
| value | is PSI |
|
inline |
to set the time
| value | is time |
|
inline |
to set the vx (velocity in x coordinate)
| value | is vx |
|
inline |
to set the vy (velocity in y coordinate)
| value | is vy |
|
inline |
to set the X
| value | is X |
|
inline |
to set the Y
| value | is Y |
|
inline |
to set the Z
| value | is Z |
| adoreMatrix<double, 9, 1> adore::fun::VehicleMotionState9d::data_ |
| double adore::fun::VehicleMotionState9d::time_ |