|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <vehiclebasemeasurement.h>
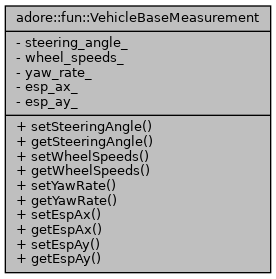
Public Member Functions | |
| void | setSteeringAngle (float value) |
| float | getSteeringAngle () const |
| void | setWheelSpeeds (const std::vector< float > value) |
| const std::vector< float > & | getWheelSpeeds () const |
| void | setYawRate (float value) |
| float | getYawRate () const |
| void | setEspAx (float value) |
| float | getEspAx () const |
| void | setEspAy (float value) |
| float | getEspAy () const |
Private Attributes | |
| float | steering_angle_ |
| std::vector< float > | wheel_speeds_ |
| float | yaw_rate_ |
| float | esp_ax_ |
| float | esp_ay_ |
A set of measurement values obtained from vehicle base system
|
inline |

|
inline |

|
inline |

|
inline |

|
inline |

|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
private |
|
private |
|
private |
|
private |
|
private |