|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <basicconstraintsandreferences.h>
Public Member Functions | |
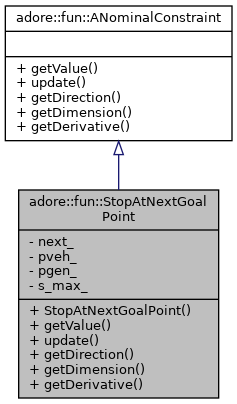
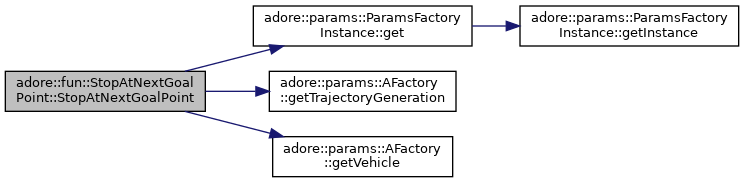
| StopAtNextGoalPoint (const adore::view::ANavigationGoalView *next) | |
| virtual double | getValue (double t, double s, double ds) const override |
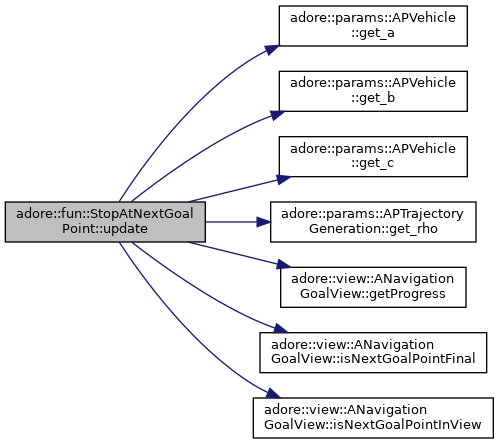
| virtual void | update (double t0, double s0, double ds0) override |
| virtual ConstraintDirection | getDirection () override |
| virtual int | getDimension () override |
| virtual int | getDerivative () override |
Private Attributes | |
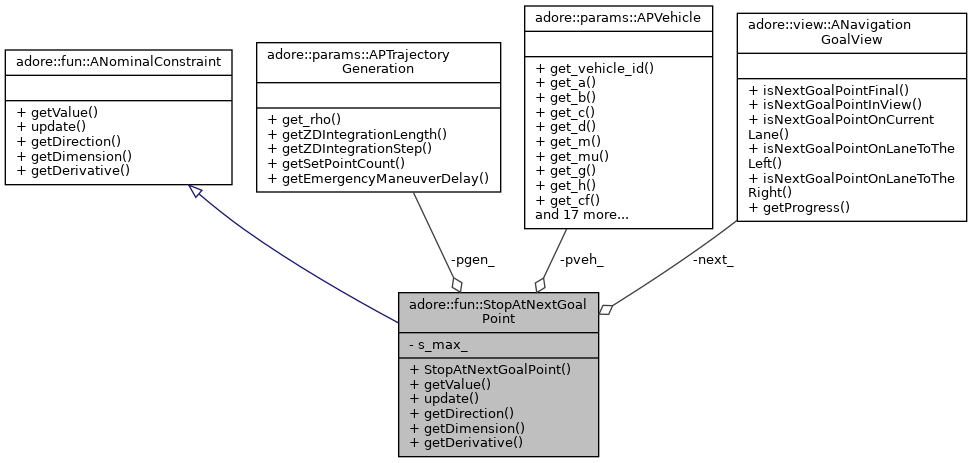
| const adore::view::ANavigationGoalView * | next_ |
| const adore::params::APVehicle * | pveh_ |
| const adore::params::APTrajectoryGeneration * | pgen_ |
| double | s_max_ |
Additional Inherited Members | |
 Public Types inherited from adore::fun::ANominalConstraint Public Types inherited from adore::fun::ANominalConstraint | |
| enum | ConstraintDirection { LB , UB } |
A constraint, which upper bounds the position of the ego vehicle according to the next goalpoint
|
inline |
|
inlineoverridevirtual |
Determine for which derivative of given dimension this constraint is responsible.
Implements adore::fun::ANominalConstraint.
|
inlineoverridevirtual |
Determine for which dimension this constraint is responsible (e.g. longitudinal, lateral, etc.)
Implements adore::fun::ANominalConstraint.
|
inlineoverridevirtual |
Determine whether this constraint is an upper or lower bound.
Implements adore::fun::ANominalConstraint.
|
inlineoverridevirtual |
return the value of the constraint at a certain time and position
| t | the time |
| s | progress along the road-relative coordinate system |
| ds | derivative of s |
Implements adore::fun::ANominalConstraint.
|
inlineoverridevirtual |
Refresh values of the constraint object. Allows parameters and precomputations to buffered for one planning cycle.
| t0 | start time for planning |
| s0 | start progress in road-relative coordinate system |
| ds0 | derivative of s at t0 |
Implements adore::fun::ANominalConstraint.
|
private |
|
private |
|
private |
|
private |