|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <roadcoordinates.h>
Classes | |
| class | ZeroDynamicsModel |
Public Member Functions | |
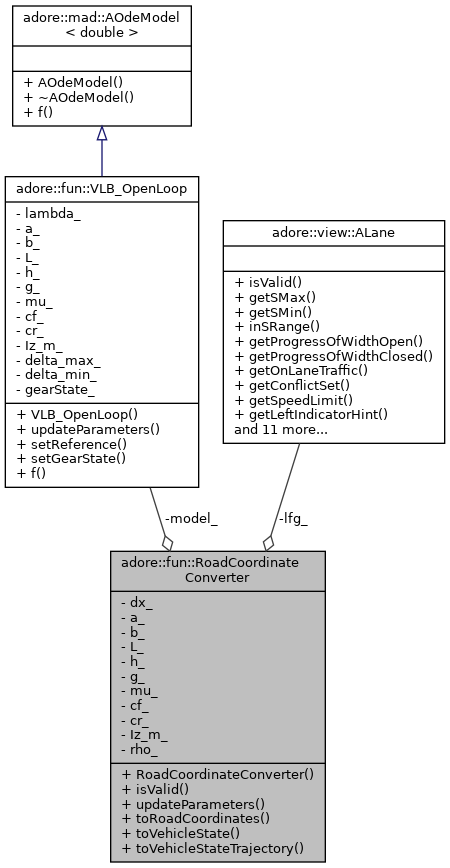
| RoadCoordinateConverter (adore::view::ALane *lfg, adore::params::APVehicle *p, adore::params::APTrajectoryGeneration *tp) | |
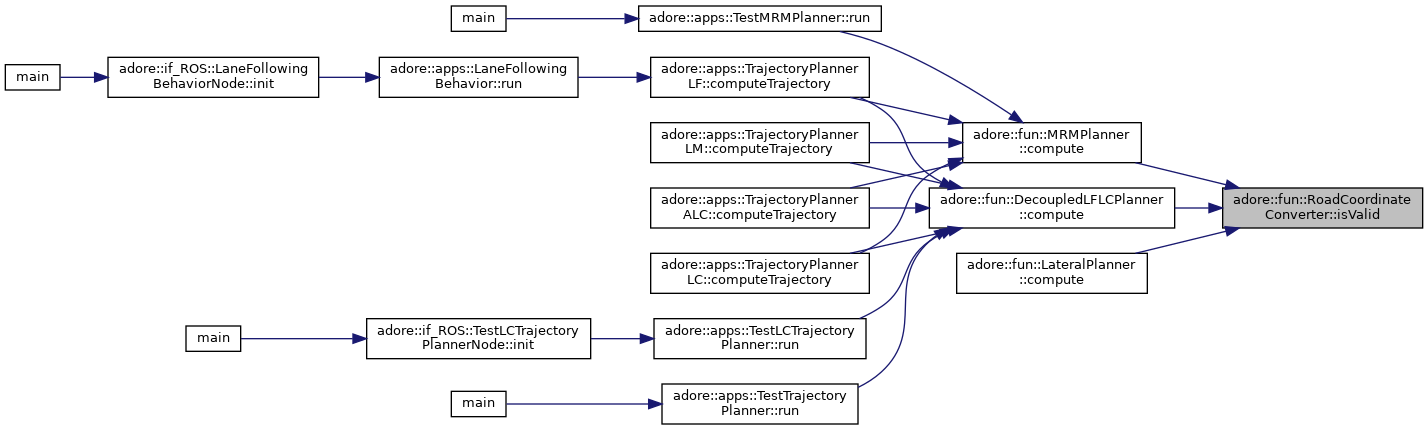
| bool | isValid () |
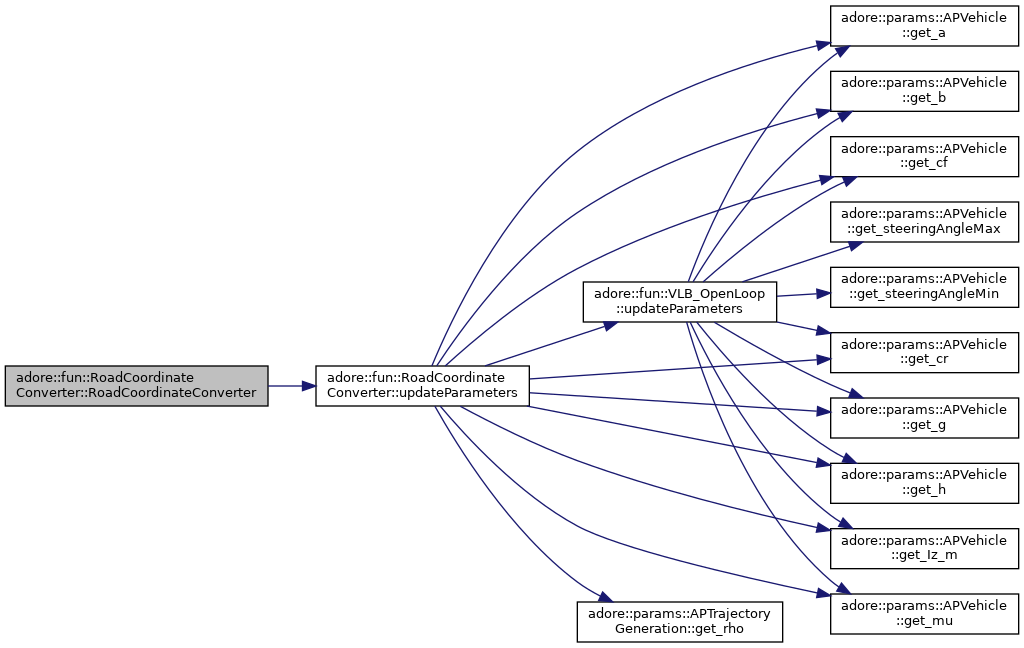
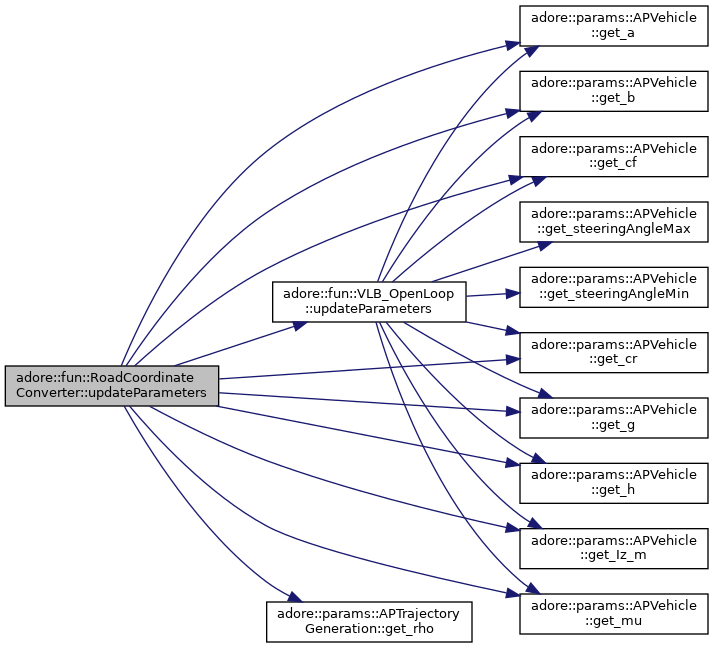
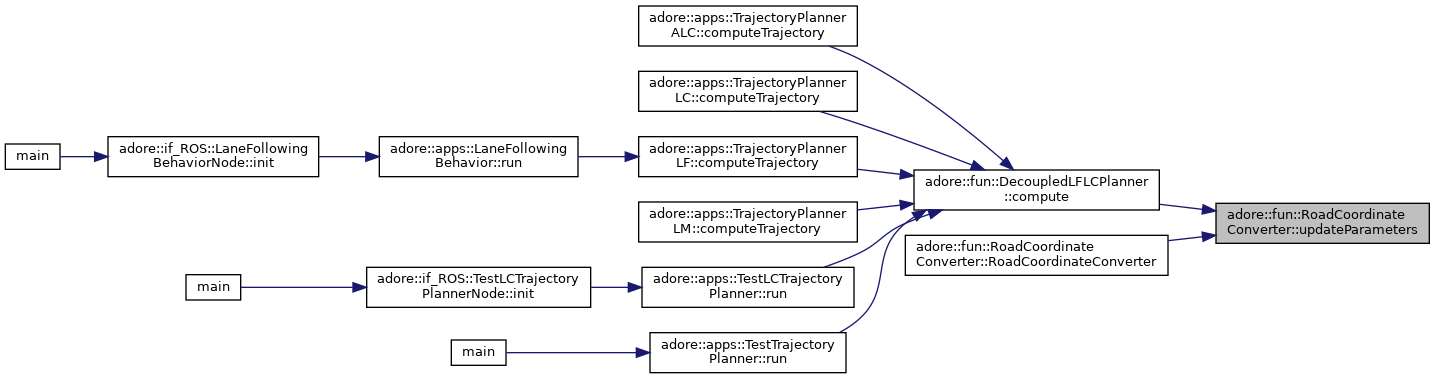
| void | updateParameters (adore::params::APVehicle *p, adore::params::APTrajectoryGeneration *tp) |
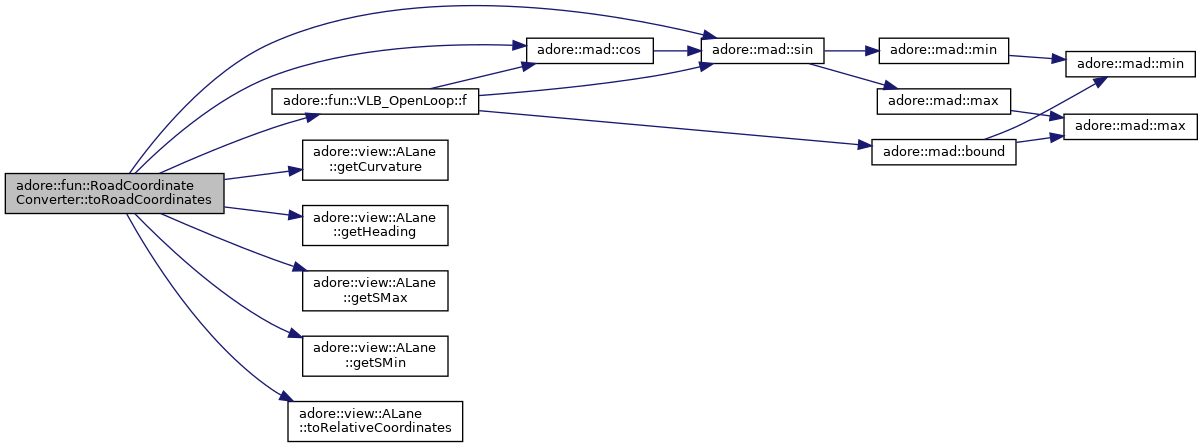
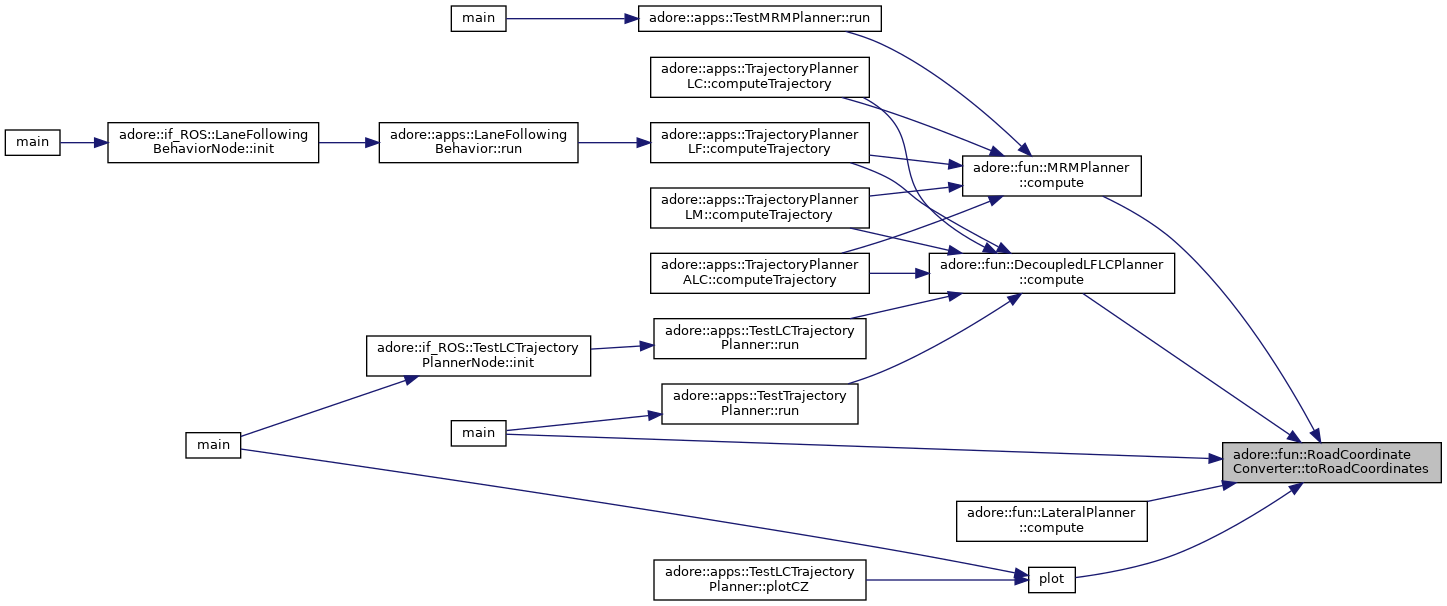
| RoadCoordinates | toRoadCoordinates (const PlanarVehicleState10d &x, bool log=false) |
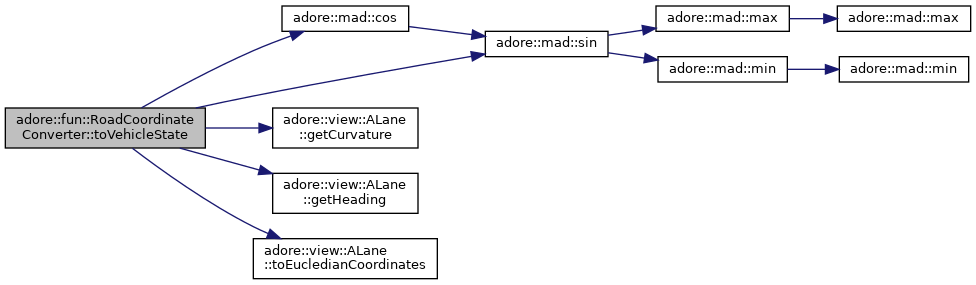
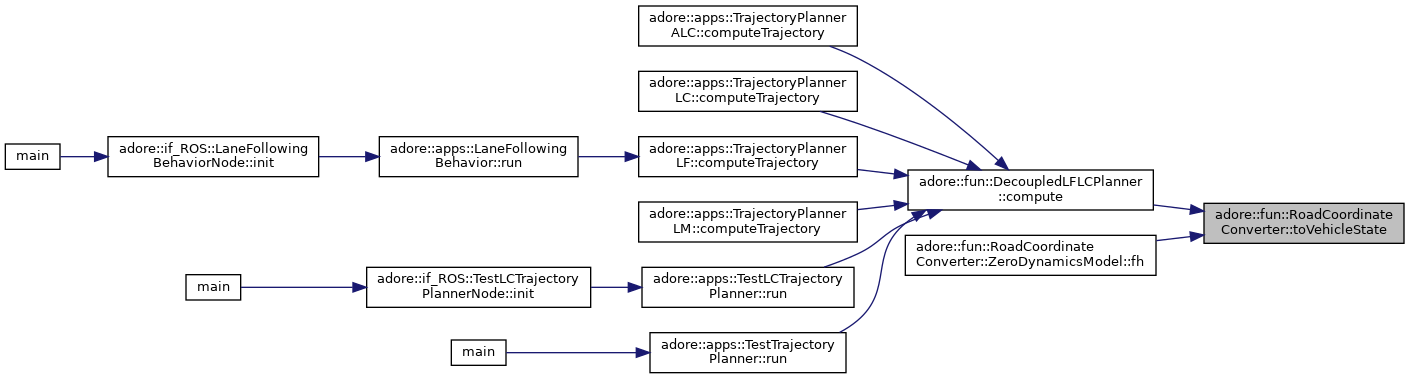
| void | toVehicleState (const RoadCoordinates &r, double psi, double omega, PlanarVehicleState10d &x, bool log=false) |
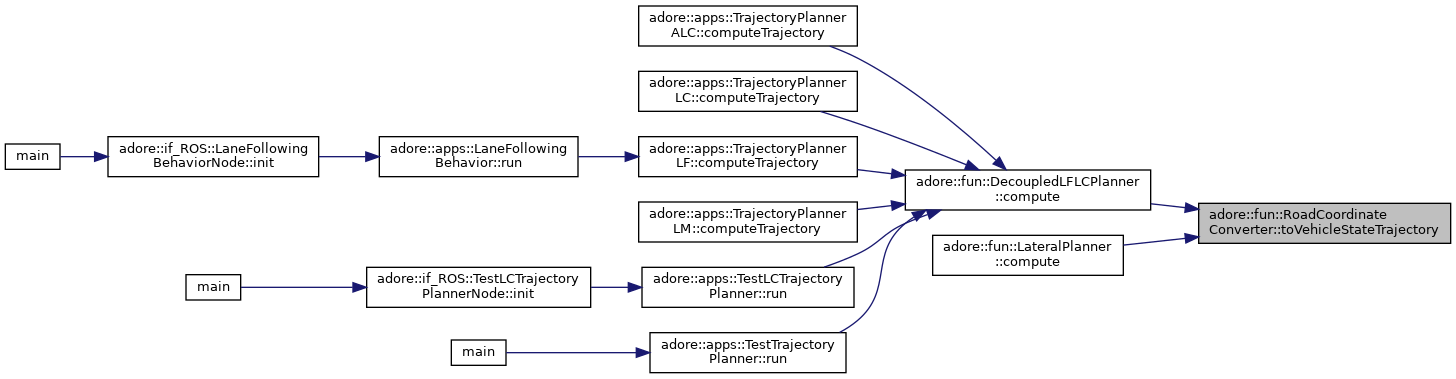
| adoreMatrix< double, 0, 0 > | toVehicleStateTrajectory (adore::mad::AScalarToN< double, 4 > *lon_trajectory_rc, adore::mad::AScalarToN< double, 4 > *lat_trajectory_rc, const adoreMatrix< double, 1, 0 > &integration_time, double s0, double psi0, double omega0) |
Private Attributes | |
| adore::view::ALane * | lfg_ |
| VLB_OpenLoop | model_ |
| adoreMatrix< double, 0, 1 > | dx_ |
| double | a_ |
| double | b_ |
| double | L_ |
| double | h_ |
| double | g_ |
| double | mu_ |
| double | cf_ |
| double | cr_ |
| double | Iz_m_ |
| double | rho_ |
Converts vehicles state between road relative frame and Euclidean/vehicle frame
|
inline |
Constructor
| lfg | lane following view supplies road relative coordinate system |
| p | vehicle parameters |
| tp | trajectory generation parameters |
|
inline |

|
inline |
Compute road coordinates from vehicle state.
| x | vehicle state in Euclidean coordinates |
currently not required
currently not required
|
inline |
Compute vehicle state from road coordiantes The zero dynamic state has to be provided in order to allow the euqation to be solved. In this method, the zero dynamic state is represented by z=[psi,omega=d psi/dt]
| r | the vehicle state in road-relative coordinates |
| psi | the yaw angle of the vehicle, when arriving at r |
| omega | the yaw rate of the vehicle, when arriving at r |
| x | the resulting full vehicle state with position in Euclidean cordinates. Returned by function. |
|
inline |
Converts a decoupled plan in road coordinates into a 10d vehicle state trajectory. The zero dynamics are initialized with psi0 and omega0 (expected states at the beginning of the plan).
| lon_trajectory_rc | the longitudinal plan |
| lat_trajectory_rc | the lateral plan |
| integration_time | the time parametrization of the resulting trajectory, also time steps of integration |
| s0 | progress offset to be used if longitudinal plan starts at 0 |
| psi0 | initial heading of vehicle |
| omega0 | initial yaw rate of vehicle |

|
inline |
update and cache parameters
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |