|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <anominalplanner.h>
Public Member Functions | |
| virtual bool | getValueIfAvailable (double t, double s, double ds, double &ref) const =0 |
| virtual void | update (double t0, double s0, double ds0)=0 |
| virtual int | getDimension ()=0 |
| virtual int | getDerivative ()=0 |
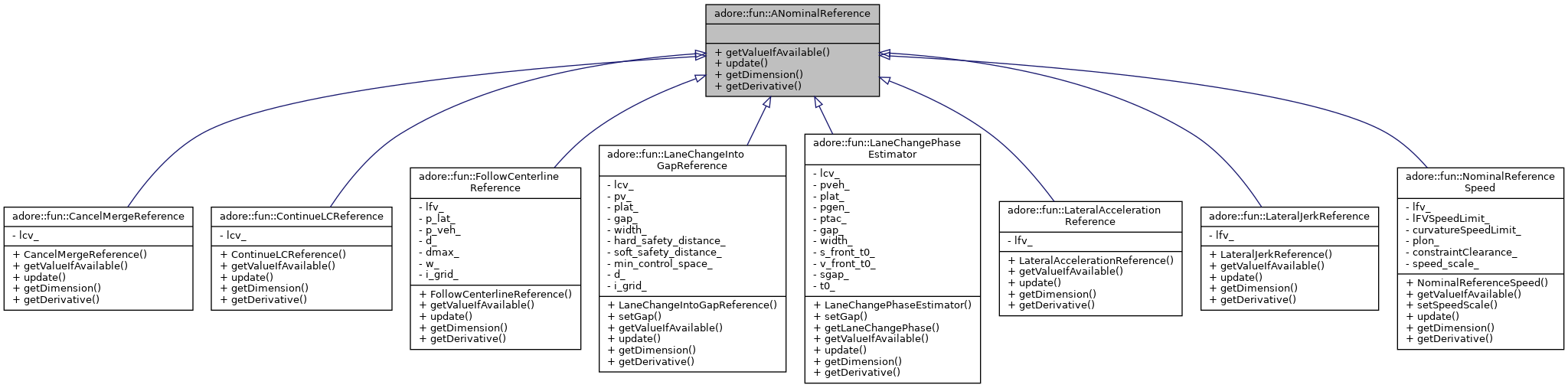
Interface for reference values specified in road-relative coordinates. The term reference is here applied as in convex optimization, where the deviation from the reference is penalized.
|
pure virtual |
Determine for which derivative of given dimension this reference is responsible.
Implemented in adore::fun::ContinueLCReference, adore::fun::CancelMergeReference, adore::fun::LaneChangeIntoGapReference, adore::fun::LaneChangePhaseEstimator, adore::fun::FollowCenterlineReference, adore::fun::NominalReferenceSpeed, adore::fun::LateralJerkReference, and adore::fun::LateralAccelerationReference.
|
pure virtual |
Determine for which dimension this reference is responsible (e.g. longitudinal, lateral, etc.)
Implemented in adore::fun::ContinueLCReference, adore::fun::CancelMergeReference, adore::fun::LaneChangeIntoGapReference, adore::fun::LaneChangePhaseEstimator, adore::fun::FollowCenterlineReference, adore::fun::NominalReferenceSpeed, adore::fun::LateralJerkReference, and adore::fun::LateralAccelerationReference.
|
pure virtual |
Determine whether a reference is available and retrieve its value.
| t | time |
| s | progress along coordinate system |
Implemented in adore::fun::ContinueLCReference, adore::fun::CancelMergeReference, adore::fun::LaneChangeIntoGapReference, adore::fun::LaneChangePhaseEstimator, adore::fun::FollowCenterlineReference, adore::fun::NominalReferenceSpeed, adore::fun::LateralJerkReference, and adore::fun::LateralAccelerationReference.
|
pure virtual |
Refresh values of the reference object. Allows parameters and precomputations to buffered for one planning cycle.
| t0 | start time for planning |
| s0 | start progress in road-relative coordinate system |
| ds0 | derivative of s at t0 |
Implemented in adore::fun::ContinueLCReference, adore::fun::CancelMergeReference, adore::fun::LaneChangeIntoGapReference, adore::fun::LaneChangePhaseEstimator, adore::fun::FollowCenterlineReference, adore::fun::NominalReferenceSpeed, adore::fun::LateralJerkReference, and adore::fun::LateralAccelerationReference.