|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
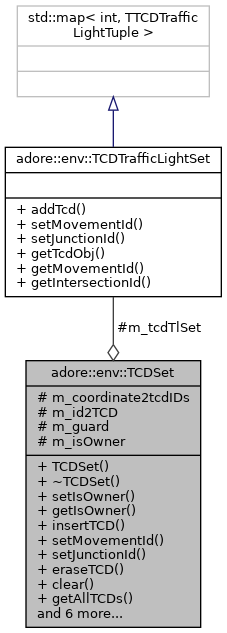
#include <tcdset.h>
Classes | |
| struct | itpair |
| struct | my_equal |
Public Member Functions | |
| TCDSet () | |
| virtual | ~TCDSet () |
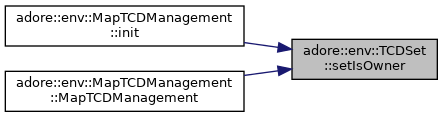
| void | setIsOwner (bool b) |
| bool | getIsOwner () |
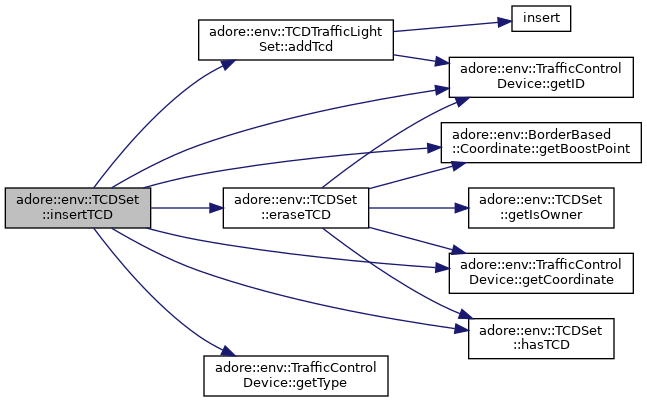
| bool | insertTCD (env::TrafficControlDevice *tcd) |
| void | setMovementId (int tcdId, int movementId) |
| void | setJunctionId (int movementId, int junctionId) |
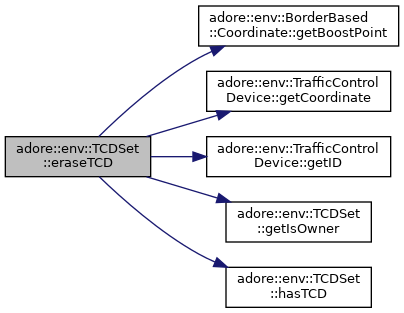
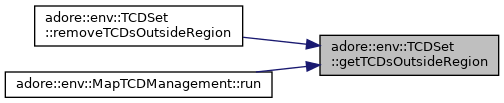
| bool | eraseTCD (int tcdID) |
| void | clear () |
| TCDIteratorPair | getAllTCDs () |
| ItCoordinate2tcdID | getTCDsInRegion (double x0, double x1, double y0, double y1) |
| ItCoordinate2tcdID | getTCDsOutsideRegion (double x0, double x1, double y0, double y1) |
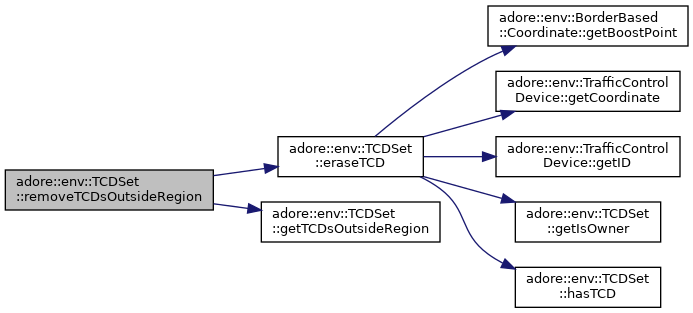
| void | removeTCDsOutsideRegion (double x0, double x1, double y0, double y1) |
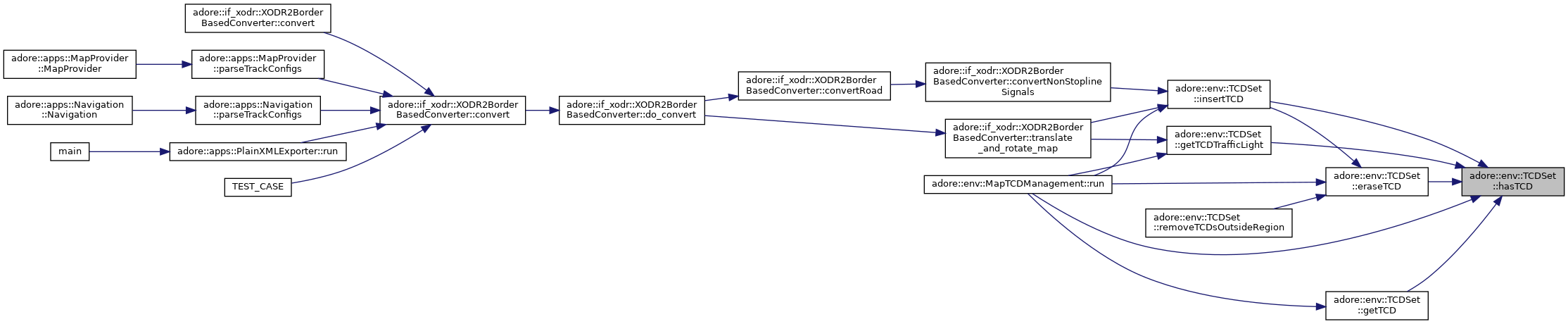
| bool | hasTCD (int tcdID) |
| env::TrafficControlDevice * | getTCD (int tcdID) |
| env::TTCDTrafficLightTuple | getTCDTrafficLight (int tcdID) |
Protected Attributes | |
| Coordinate2tcdIDs_RT | m_coordinate2tcdIDs |
| std::unordered_map< int, env::TrafficControlDevice * > | m_id2TCD |
| adore::env::TCDTrafficLightSet | m_tcdTlSet |
| double | m_guard |
| bool | m_isOwner |
Private Types | |
| typedef boost::geometry::model::box< env::BorderBased::Coordinate::boost_point > | boost_box |
| typedef std::pair< env::BorderBased::Coordinate::boost_point, int > | idxCoordinate2tcdID |
| typedef boost::geometry::index::rtree< idxCoordinate2tcdID, boost::geometry::index::quadratic< 16 >, boost::geometry::index::indexable< idxCoordinate2tcdID >, my_equal< idxCoordinate2tcdID, env::BorderBased::Coordinate::boost_point > > | Coordinate2tcdIDs_RT |
| typedef std::pair< std::unordered_map< int, env::TrafficControlDevice * >::iterator, std::unordered_map< int, env::TrafficControlDevice * >::iterator > | TCDIteratorPair |
| typedef itpair< Coordinate2tcdIDs_RT::const_query_iterator, Coordinate2tcdIDs_RT::const_query_iterator > | ItCoordinate2tcdID |
TCD Set that maps from coordinate to a list of TCDs with rTree from BOOST
|
private |
|
private |
|
private |
|
private |
|
private |
|
inline |
Constructor
|
inlinevirtual |
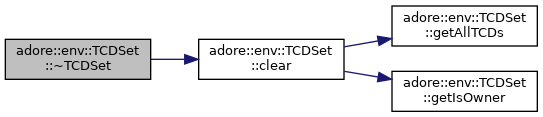
Destructor clear xodrTCDSet
|
inline |
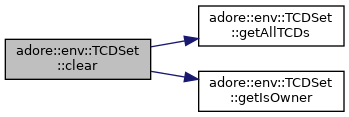
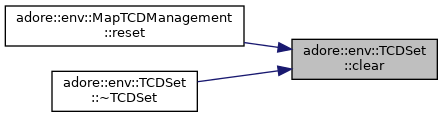
clear clear xodrTCDSet, also deletes TCD if owner
|
inline |
erase DO NOT USE WHILE ITERATING WITH ITERATORS OVER RTree! erases specifed TCD from xodrTCDSet, if xodrTCDSet is owner also deletes TCD returns false if TCD does not exist

|
inline |
getAllTCDs get begin() and end() iterators for all TCDs in xodrTCDSet

|
inline |
getIsOwner returns true if xodrTCDSet is responsible for memory management

|
inline |


|
inline |
getTCDsInRegion get begin() and end() iterators for all TCDs in defined region

|
inline |
getTCDsOutsideRegion get begin() and end() iterators for all TCDs outsite of defined region
|
inline |


|
inline |
hasTCD returns true if TCD is in xodrTCDSet
|
inline |
insert new TCD as for now, if TCD already exists, replace it returns false if TCD was replaced

|
inline |
removing TCDs in given region without
|
inline |
setIsOwner if xodrTCDSet is responsible for memory management, set true
|
inline |


|
inline |


|
protected |
|
protected |
|
protected |
|
protected |
|
protected |