|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <lanechangegaps.h>
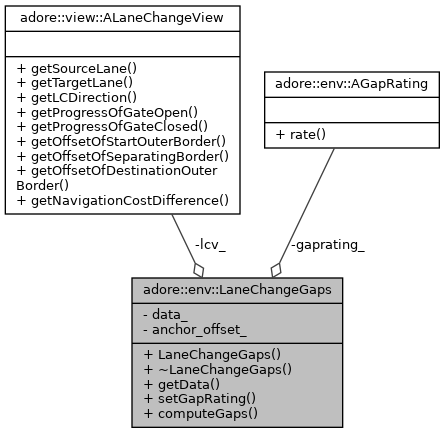
Public Member Functions | |
| LaneChangeGaps (adore::view::ALaneChangeView *lcv) | |
| ~LaneChangeGaps () | |
| GapQueue & | getData () |
| void | setGapRating (AGapRating *gaprating) |
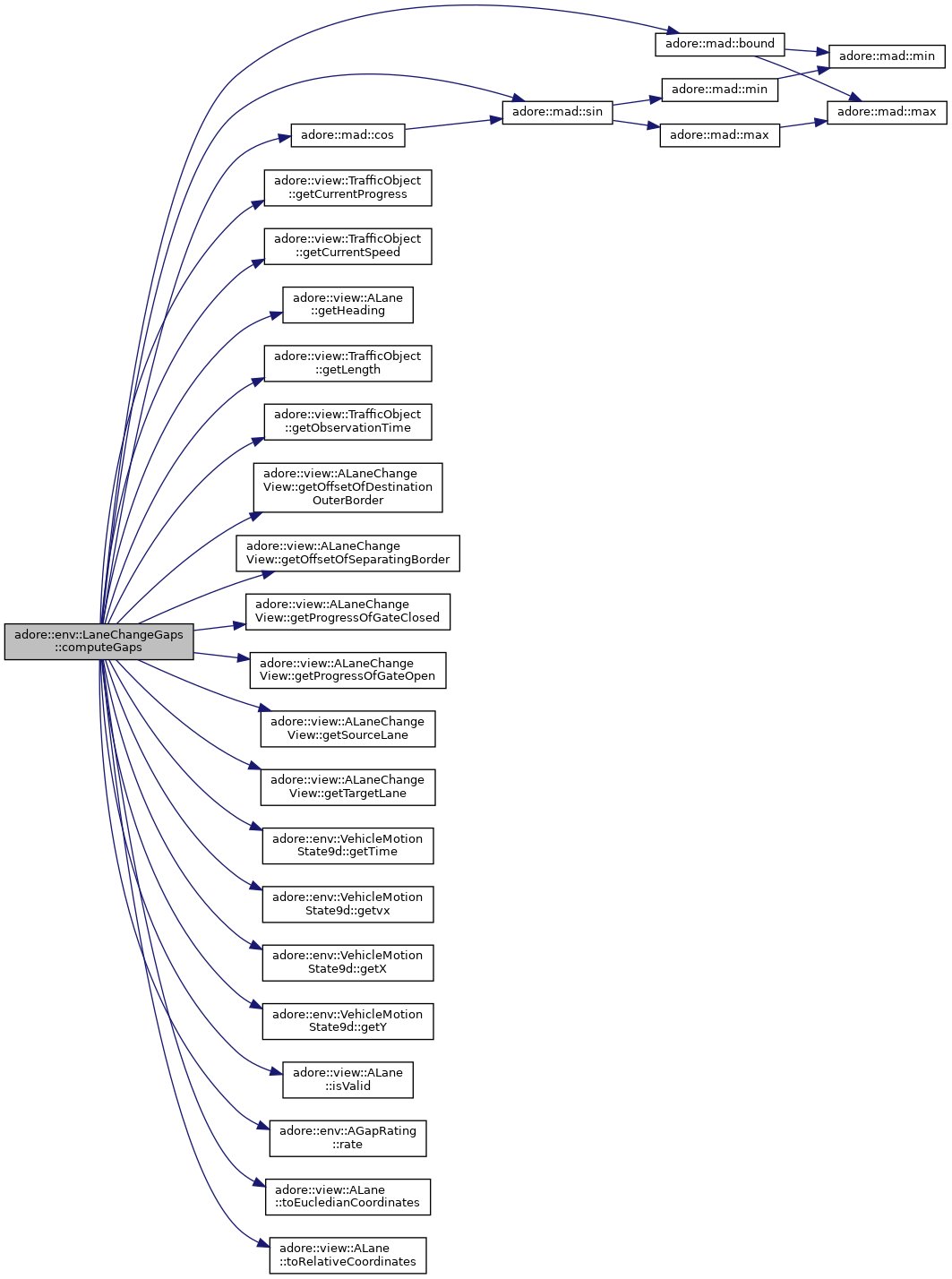
| void | computeGaps (const adore::view::TrafficQueue &queue, const adore::env::VehicleMotionState9d &ego) |
Private Attributes | |
| GapQueue | data_ |
| adore::view::ALaneChangeView * | lcv_ |
| double | anchor_offset_ |
| AGapRating * | gaprating_ |
LaneChangeGaps computes gaps that are available for a lane change
|
inline |
|
inline |

|
inline |

|
inline |

|
inline |

|
private |
|
private |
|
private |
|
private |