#include <connectionsonlane.h>
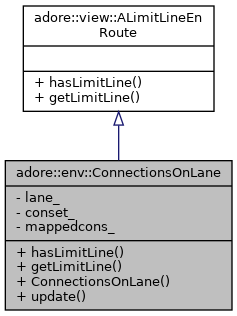
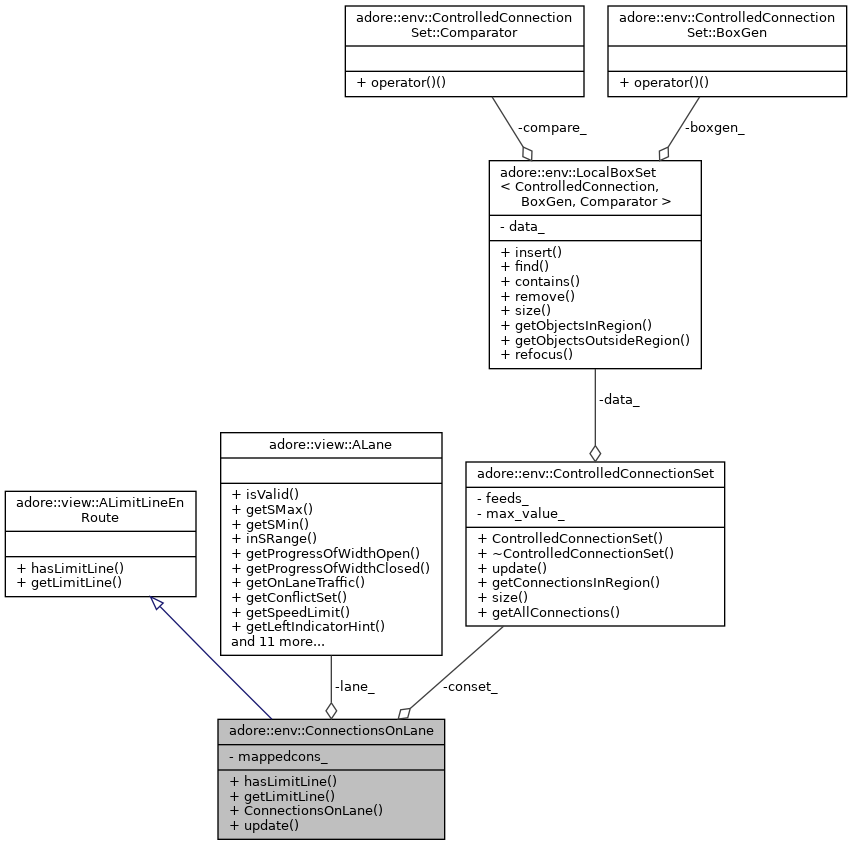
ConnectionsOnLane maps ControlledConnections ("signalized parts of the road") to a lane. ConnectionsOnLane also implements adore::view::ALimitLineEnRoute to provide a view
◆ ConnectionsOnLane()
◆ getLimitLine()
◆ hasLimitLine()
| virtual bool adore::env::ConnectionsOnLane::hasLimitLine |
( |
double |
s0 | ) |
|
|
inlineoverridevirtual |
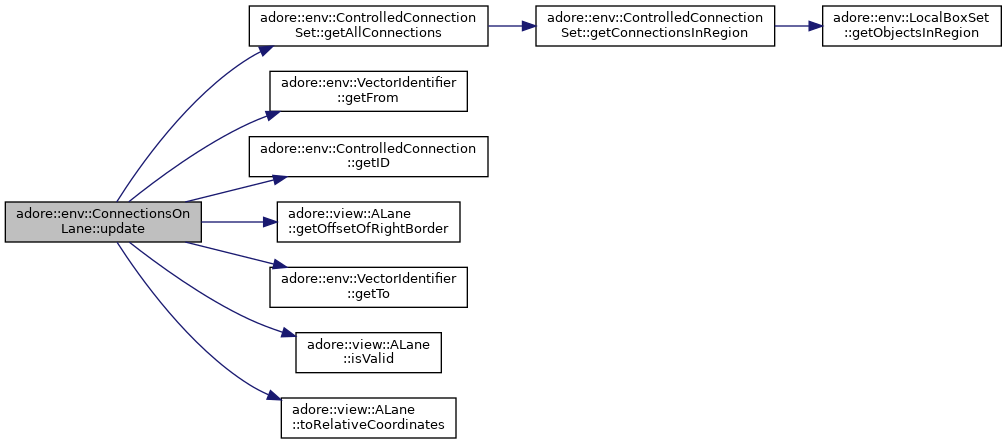
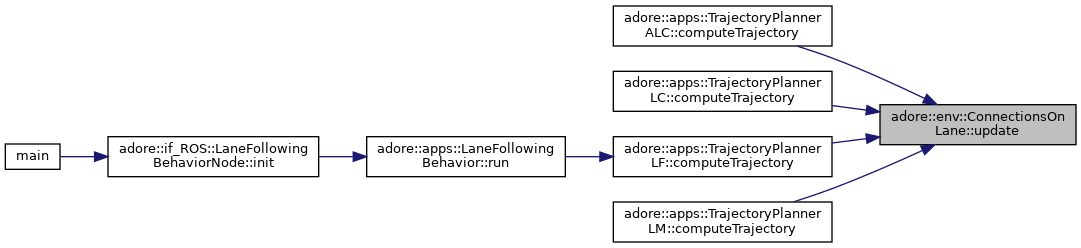
◆ update()
| void adore::env::ConnectionsOnLane::update |
( |
| ) |
|
|
inline |
(Re-)compute the mapping of connections to associated lane.
◆ conset_
the set of known connections
◆ lane_
◆ mappedcons_
a list of connections on the lane
The documentation for this class was generated from the following file:
- /home/akoerner/repos/csa/github.com/akoerner1/adore_docs_publish/adore/libadore/libadore/adore/env/include/adore/env/tcd/connectionsonlane.h