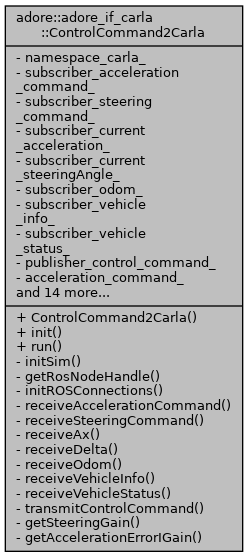
◆ ControlCommand2Carla()
| adore::adore_if_carla::ControlCommand2Carla::ControlCommand2Carla |
( |
| ) |
|
|
inline |
◆ getAccelerationErrorIGain()
| double adore::adore_if_carla::ControlCommand2Carla::getAccelerationErrorIGain |
( |
| ) |
|
|
inlineprivate |
◆ getRosNodeHandle()
| ros::NodeHandle* adore::adore_if_carla::ControlCommand2Carla::getRosNodeHandle |
( |
| ) |
|
|
inlineprivate |
◆ getSteeringGain()
| double adore::adore_if_carla::ControlCommand2Carla::getSteeringGain |
( |
| ) |
|
|
inlineprivate |
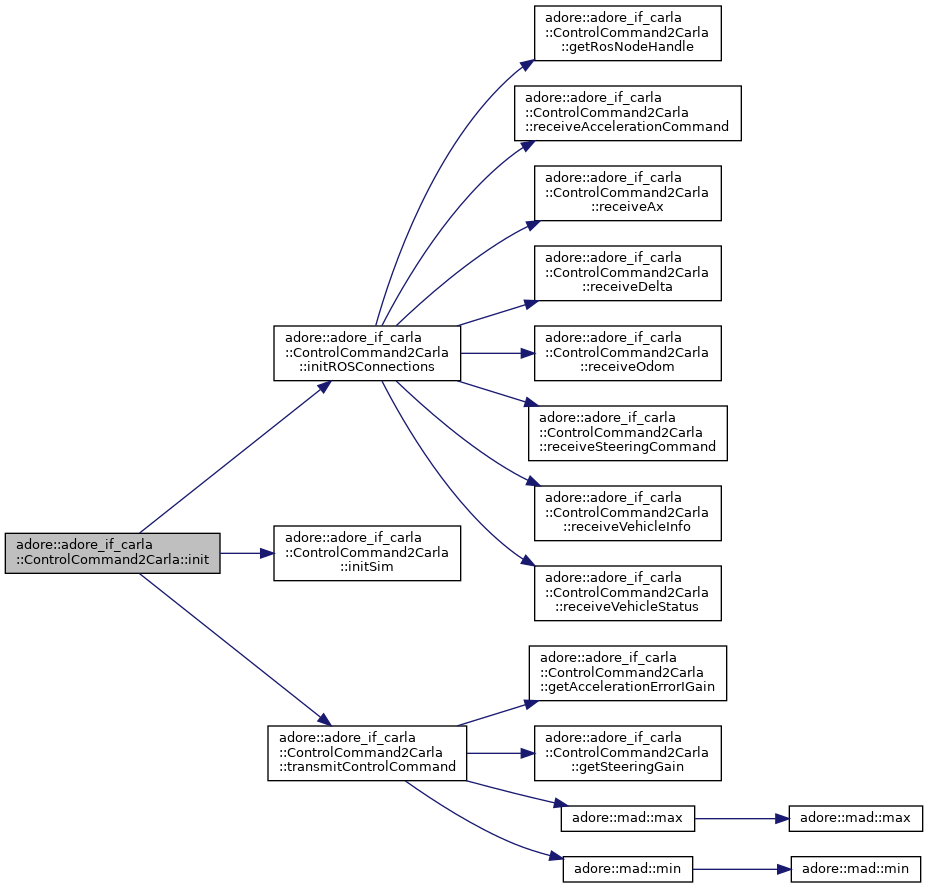
◆ init()
| void adore::adore_if_carla::ControlCommand2Carla::init |
( |
int |
argc, |
|
|
char ** |
argv, |
|
|
double |
rate, |
|
|
std::string |
nodename |
|
) |
| |
|
inline |
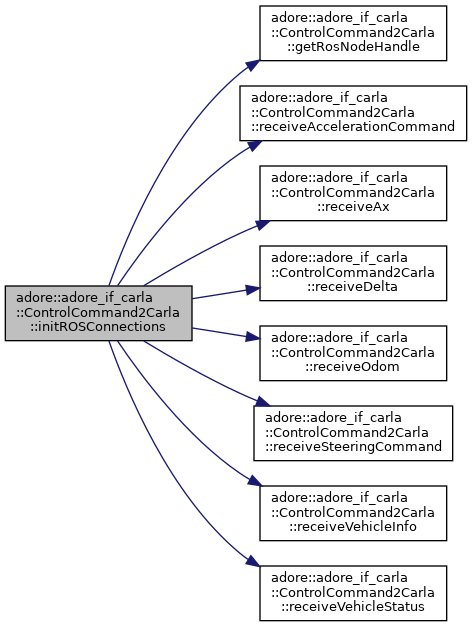
◆ initROSConnections()
| void adore::adore_if_carla::ControlCommand2Carla::initROSConnections |
( |
| ) |
|
|
inlineprivate |
◆ initSim()
| void adore::adore_if_carla::ControlCommand2Carla::initSim |
( |
| ) |
|
|
inlineprivate |
◆ receiveAccelerationCommand()
| void adore::adore_if_carla::ControlCommand2Carla::receiveAccelerationCommand |
( |
const std_msgs::Float32ConstPtr & |
in_msg | ) |
|
|
inlineprivate |
◆ receiveAx()
| void adore::adore_if_carla::ControlCommand2Carla::receiveAx |
( |
const std_msgs::Float32ConstPtr & |
in_msg | ) |
|
|
inlineprivate |
◆ receiveDelta()
| void adore::adore_if_carla::ControlCommand2Carla::receiveDelta |
( |
const std_msgs::Float32ConstPtr & |
in_msg | ) |
|
|
inlineprivate |
◆ receiveOdom()
| void adore::adore_if_carla::ControlCommand2Carla::receiveOdom |
( |
const nav_msgs::OdometryConstPtr & |
in_msg | ) |
|
|
inlineprivate |
◆ receiveSteeringCommand()
| void adore::adore_if_carla::ControlCommand2Carla::receiveSteeringCommand |
( |
const std_msgs::Float32ConstPtr & |
in_msg | ) |
|
|
inlineprivate |
◆ receiveVehicleInfo()
| void adore::adore_if_carla::ControlCommand2Carla::receiveVehicleInfo |
( |
const carla_msgs::CarlaEgoVehicleInfoConstPtr & |
in_msg | ) |
|
|
inlineprivate |
◆ receiveVehicleStatus()
| void adore::adore_if_carla::ControlCommand2Carla::receiveVehicleStatus |
( |
const carla_msgs::CarlaEgoVehicleStatusConstPtr & |
in_msg | ) |
|
|
inlineprivate |
◆ run()
| void adore::adore_if_carla::ControlCommand2Carla::run |
( |
| ) |
|
|
inline |
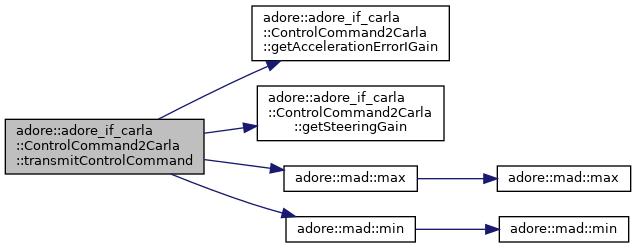
◆ transmitControlCommand()
| void adore::adore_if_carla::ControlCommand2Carla::transmitControlCommand |
( |
const ros::TimerEvent & |
te | ) |
|
|
inlineprivate |
◆ acceleration_command_
| double adore::adore_if_carla::ControlCommand2Carla::acceleration_command_ |
|
private |
◆ carla_ego_vehicle_info_
| carla_msgs::CarlaEgoVehicleInfo adore::adore_if_carla::ControlCommand2Carla::carla_ego_vehicle_info_ |
|
private |
◆ carla_ego_vehicle_max_steer_angle_
| double adore::adore_if_carla::ControlCommand2Carla::carla_ego_vehicle_max_steer_angle_ |
|
private |
◆ carla_ego_vehicle_status_
| carla_msgs::CarlaEgoVehicleStatus adore::adore_if_carla::ControlCommand2Carla::carla_ego_vehicle_status_ |
|
private |
◆ current_acceleration_
| double adore::adore_if_carla::ControlCommand2Carla::current_acceleration_ |
|
private |
◆ current_steeringAngle_
| double adore::adore_if_carla::ControlCommand2Carla::current_steeringAngle_ |
|
private |
◆ current_vx_
| double adore::adore_if_carla::ControlCommand2Carla::current_vx_ |
|
private |
◆ integrator_error_ax_
| double adore::adore_if_carla::ControlCommand2Carla::integrator_error_ax_ |
|
private |
◆ integrator_error_delta_
| double adore::adore_if_carla::ControlCommand2Carla::integrator_error_delta_ |
|
private |
◆ last_error_ax_
| double adore::adore_if_carla::ControlCommand2Carla::last_error_ax_ |
|
private |
◆ last_error_delta_
| double adore::adore_if_carla::ControlCommand2Carla::last_error_delta_ |
|
private |
◆ last_throttle_
| double adore::adore_if_carla::ControlCommand2Carla::last_throttle_ |
|
private |
◆ n_
| ros::NodeHandle* adore::adore_if_carla::ControlCommand2Carla::n_ |
|
private |
◆ namespace_carla_
| std::string adore::adore_if_carla::ControlCommand2Carla::namespace_carla_ |
|
private |
◆ publisher_control_command_
| ros::Publisher adore::adore_if_carla::ControlCommand2Carla::publisher_control_command_ |
|
private |
◆ steering_command_
| double adore::adore_if_carla::ControlCommand2Carla::steering_command_ |
|
private |
◆ subscriber_acceleration_command_
| ros::Subscriber adore::adore_if_carla::ControlCommand2Carla::subscriber_acceleration_command_ |
|
private |
◆ subscriber_current_acceleration_
| ros::Subscriber adore::adore_if_carla::ControlCommand2Carla::subscriber_current_acceleration_ |
|
private |
◆ subscriber_current_steeringAngle_
| ros::Subscriber adore::adore_if_carla::ControlCommand2Carla::subscriber_current_steeringAngle_ |
|
private |
◆ subscriber_odom_
| ros::Subscriber adore::adore_if_carla::ControlCommand2Carla::subscriber_odom_ |
|
private |
◆ subscriber_steering_command_
| ros::Subscriber adore::adore_if_carla::ControlCommand2Carla::subscriber_steering_command_ |
|
private |
◆ subscriber_vehicle_info_
| ros::Subscriber adore::adore_if_carla::ControlCommand2Carla::subscriber_vehicle_info_ |
|
private |
◆ subscriber_vehicle_status_
| ros::Subscriber adore::adore_if_carla::ControlCommand2Carla::subscriber_vehicle_status_ |
|
private |
◆ transmitControlCommandTimer_
| ros::Timer adore::adore_if_carla::ControlCommand2Carla::transmitControlCommandTimer_ |
|
private |
The documentation for this class was generated from the following file:
- /home/akoerner/repos/csa/github.com/akoerner1/adore_docs_publish/adore/adore_if_carla/adore_if_carla/src/controlcommand2carla.cpp