|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <prediction_config.h>
Classes | |
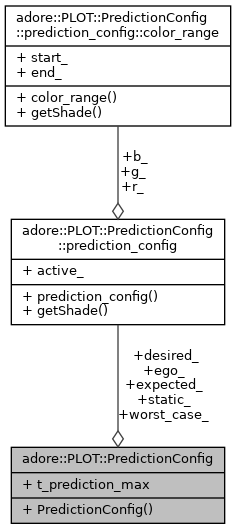
| struct | prediction_config |
Public Member Functions | |
| PredictionConfig () | |
Public Attributes | |
| prediction_config | desired_ |
| prediction_config | expected_ |
| prediction_config | worst_case_ |
| prediction_config | ego_ |
| prediction_config | static_ |
| double | t_prediction_max = 10.0 |
|
inline |
| prediction_config adore::PLOT::PredictionConfig::desired_ |
| prediction_config adore::PLOT::PredictionConfig::ego_ |
| prediction_config adore::PLOT::PredictionConfig::expected_ |
| prediction_config adore::PLOT::PredictionConfig::static_ |
| double adore::PLOT::PredictionConfig::t_prediction_max = 10.0 |
| prediction_config adore::PLOT::PredictionConfig::worst_case_ |