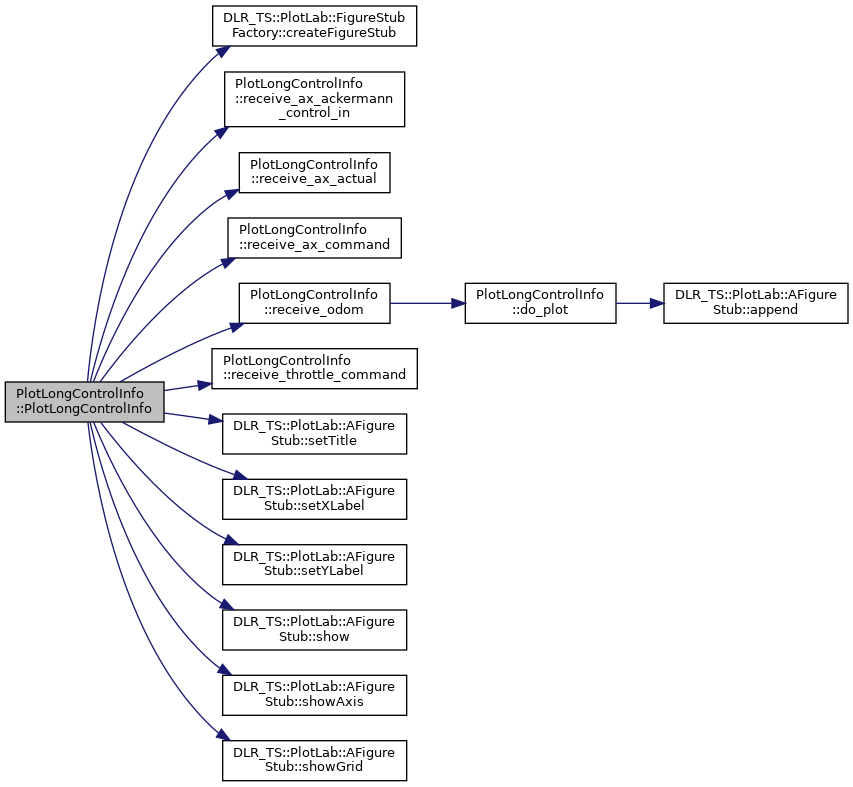
◆ PlotLongControlInfo()
| PlotLongControlInfo::PlotLongControlInfo |
( |
| ) |
|
|
inline |
◆ do_plot()
| void PlotLongControlInfo::do_plot |
( |
| ) |
|
|
inlineprivate |
◆ receive_ax_ackermann_control_in()
| void PlotLongControlInfo::receive_ax_ackermann_control_in |
( |
ackermann_msgs::AckermannDriveConstPtr |
msg | ) |
|
|
inlineprivate |
◆ receive_ax_actual()
| void PlotLongControlInfo::receive_ax_actual |
( |
std_msgs::Float32ConstPtr |
msg | ) |
|
|
inlineprivate |
◆ receive_ax_command()
| void PlotLongControlInfo::receive_ax_command |
( |
std_msgs::Float32ConstPtr |
msg | ) |
|
|
inlineprivate |
◆ receive_odom()
| void PlotLongControlInfo::receive_odom |
( |
nav_msgs::OdometryConstPtr |
msg | ) |
|
|
inlineprivate |
◆ receive_throttle_command()
| void PlotLongControlInfo::receive_throttle_command |
( |
carla_msgs::CarlaEgoVehicleControlConstPtr |
msg | ) |
|
|
inlineprivate |
◆ run()
| void PlotLongControlInfo::run |
( |
| ) |
|
|
inline |
◆ ax_ackermann_control_in_
| double PlotLongControlInfo::ax_ackermann_control_in_ |
|
private |
◆ ax_actual_
| double PlotLongControlInfo::ax_actual_ |
|
private |
◆ ax_command_
| double PlotLongControlInfo::ax_command_ |
|
private |
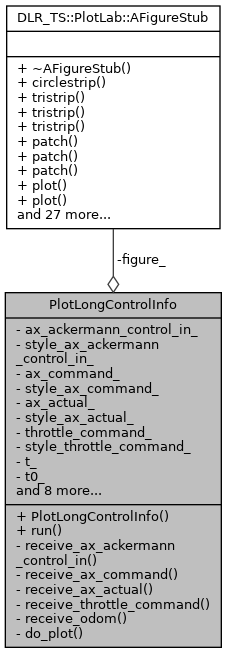
◆ figure_
◆ n_
| ros::NodeHandle* PlotLongControlInfo::n_ |
|
private |
◆ namespace_carla_
| std::string PlotLongControlInfo::namespace_carla_ |
|
private |
◆ style_ax_ackermann_control_in_
| std::string PlotLongControlInfo::style_ax_ackermann_control_in_ |
|
private |
◆ style_ax_actual_
| std::string PlotLongControlInfo::style_ax_actual_ |
|
private |
◆ style_ax_command_
| std::string PlotLongControlInfo::style_ax_command_ |
|
private |
◆ style_throttle_command_
| std::string PlotLongControlInfo::style_throttle_command_ |
|
private |
◆ subscriber_ax_ackermann_control_in_
| ros::Subscriber PlotLongControlInfo::subscriber_ax_ackermann_control_in_ |
|
private |
◆ subscriber_ax_actual_
| ros::Subscriber PlotLongControlInfo::subscriber_ax_actual_ |
|
private |
◆ subscriber_ax_command_
| ros::Subscriber PlotLongControlInfo::subscriber_ax_command_ |
|
private |
◆ subscriber_odom_
| ros::Subscriber PlotLongControlInfo::subscriber_odom_ |
|
private |
◆ subscriber_throttle_command_
| ros::Subscriber PlotLongControlInfo::subscriber_throttle_command_ |
|
private |
◆ t0_
| double PlotLongControlInfo::t0_ |
|
private |
◆ t0_set_
| bool PlotLongControlInfo::t0_set_ |
|
private |
◆ t_
| double PlotLongControlInfo::t_ |
|
private |
◆ throttle_command_
| double PlotLongControlInfo::throttle_command_ |
|
private |
The documentation for this class was generated from the following file: