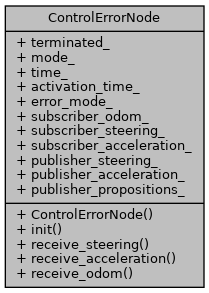
◆ ControlErrorNode()
| ControlErrorNode::ControlErrorNode |
( |
| ) |
|
|
inline |
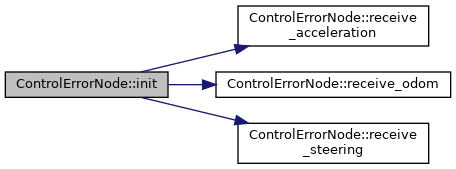
◆ init()
| void ControlErrorNode::init |
( |
| ) |
|
|
inline |
◆ receive_acceleration()
| void ControlErrorNode::receive_acceleration |
( |
std_msgs::Float32ConstPtr |
msg | ) |
|
|
inline |
◆ receive_odom()
| void ControlErrorNode::receive_odom |
( |
nav_msgs::OdometryConstPtr |
msg | ) |
|
|
inline |
◆ receive_steering()
| void ControlErrorNode::receive_steering |
( |
std_msgs::Float32ConstPtr |
msg | ) |
|
|
inline |
◆ activation_time_
| double ControlErrorNode::activation_time_ |
◆ error_mode_
| bool ControlErrorNode::error_mode_ |
◆ mode_
| int ControlErrorNode::mode_ |
◆ publisher_acceleration_
| ros::Publisher ControlErrorNode::publisher_acceleration_ |
◆ publisher_propositions_
| ros::Publisher ControlErrorNode::publisher_propositions_ |
◆ publisher_steering_
| ros::Publisher ControlErrorNode::publisher_steering_ |
◆ subscriber_acceleration_
| ros::Subscriber ControlErrorNode::subscriber_acceleration_ |
◆ subscriber_odom_
| ros::Subscriber ControlErrorNode::subscriber_odom_ |
◆ subscriber_steering_
| ros::Subscriber ControlErrorNode::subscriber_steering_ |
◆ terminated_
| bool ControlErrorNode::terminated_ |
◆ time_
| double ControlErrorNode::time_ |
The documentation for this class was generated from the following file: